
Design of biomimetic aerial-aquatic vehicle based on soft cross-medium technology

-
摘要:目的
旨在设计一种新型潜空跨介质无人航行器,该航行器可以进行空中飞行和水下潜航,并具备反复跨介质能力和良好的流体动力性能。
方法对自然选择进化后具有良好流体动力学性能的蝠鲼进行外形分析,采用三维扫描和数学拟合方法开展航行器构型研究;为实现水下隐蔽推进,通过拟合蝠鲼游动步态,采用数值分析方法,确定其推进幅值和频率;为了保护旋翼并提高空飞效率,采用涵道旋翼装置作为飞行推进装置,制定软性跨介质方案,对航行器的水下快速性、空飞性能和跨介质性能进行数值仿真。
结果结果表明:水下航行时,仿生鱼鳍摆动周期为2 s,最大摆动角度为15°时,航行器水下航速大于3 kn;空中飞行时,当潜空航行器飞行攻角为7°且旋翼转速取3 000 r/min时,航行器空飞航速大于100 km/h;空转水时平均载荷为0.171 MPa,局部最大载荷发生在结构边缘突变处,最大应力可达0.464 MPa。对航行器底部中心施加0.17 1MPa载荷,底部边缘施加0.464 MPa载荷,结构强度计算结果表明,最大应力发生在航行器底部中心,最大应力值为47.937 MPa,最大变形值为0.17411 mm。
结论设计的潜空跨介质航行器满足空飞和潜航性能指标要求,且空转水方案的流体载荷和结构安全性分析结果确保了航行器可以安全多次地在空−水介质间转换。
Abstract:ObjectivesThis study aims to develop a concept design for an unmanned aerial-aquatic cross-medium vehicle that can fly in the air and navigate underwater, and features repeatable medium transitions and superior hydrodynamic performance.
MethodsAfter analyzing the shape of batoid fish that evolved good fluid dynamics performance through natural selection, 3D scanning and mathematical fitting methods are employed to conduct a configuration study of the unmanned vehicle. To achieve covert propulsion underwater, numerical analysis methods are used to determine the propulsion amplitude and frequency by fitting the swimming gaits of batoid fish. To protect the rotor blades and enhance airborne efficiency, an innovative soft hybrid cross-medium approach is developed that uses ducted rotor devices as flight propulsion units. The numerical simulation method is then employed to study the unmanned vehicle's rapid underwater movement, aerial performance, and cross-medium capabilities.
ResultsThe results show that during underwater navigation, with a biomimetic fish fin swinging cycle of 2 seconds and a maximum swing angle of 15°, the unmanned vehicle achieves a speed of over 3 knots. During aerial flight, with an attack angle of 7° for the hybrid vehicle and rotor speed set at 3 000 r/min, the aerial speed exceeds 100 km/h. During the transition from air to water, the average load is 0.17 MPa, with the maximum load occurring at abrupt structural edges, reaching up to 0.46 MPa stress. Structural strength calculations are performed for applying 0.17 MPa load at the center bottom and 0.46 MPa load at the bottom edge of the vehicle. The maximum stress occurs at the center bottom, measuring 47.94 MPa, with maximum deformation of 0.02 mm.
ConclusionsThe designed cross-medium unmanned aerial-aquatic vehiclesatisfies the proposed requirements for both aerial and underwater operation. Furthermore, the fluid loads andstructural safety during the air-to-water transition scheme are assessed, ensuring the vehicle's ability to safelyand repeatedly shift between aerial and aquatic environments.
-
0. 引 言
潜空航行器,作为航空与航海技术融合的产物,正因其独特的隐蔽性和强大的防御突破能力而备受关注[1]。作为飞行器和潜航器的结合体,潜空航行器是一种既能在空中飞行、又能在水下潜航的新概念航行器。空中飞行时,高速机动方便掌握战场动态信息;潜航时,可潜伏探测目标、隐蔽突袭。通过集中这两种优势,潜空航行器可显著增强海军作战的能力,在现代多维立体的海战战场中发挥颠覆性的作用。目前,国内外研究机构针对潜空航行器的研究成果已有很多。
国内方面,Yao等开发了一款仿鲣鸟型潜空航行器样机[2],该样机设置了一对同轴反转螺旋桨在机身前端作为空中推进器,航行器的末端设置了水下推进器。陈怀远设计并制作了一款仿生环形胸鳍潜空航行器原理样机,对该航行器进行了流体性能论证,还开展了样机水下测试和结合空中及水面条件的系留实验 [3]。哈尔滨工程大学研制了“长弓1号”和“长弓2号”两款潜空航行器样机,样机不仅能够在空中保持稳定的飞行状态,在水下实现全自主的隐蔽航行功能,还能够在水−空两种介质间迅速转换。Lü等研制了一款旋翼、固定翼与水下滑翔机相结合的潜空跨介质无人航行器样机“哪吒III”[4],该款样机结合了固定翼滑翔机和旋翼无人机的设计,运用飞−滑融合方案实现了空−水跨介质。
国外方面, Alzu'bi推出了一款名为“Loon Copter”的潜空航行器[5],采用了内置储水系统调整自身比重,从而灵活上下潜浮。Rockenbauer等研制了一款名为“Dipper”的潜空跨介质无人航行器[6],其机翼能够在空中到水下的转换瞬间自动折叠,模仿鸟类入水动作以减缓冲击,水下阶段维持折叠状态,以获得较好的水动力性能。
目前国内外研究的潜空航行器空飞主要采用旋翼型和固定翼型[7]。旋翼型飞行器具有体积小、重量轻、噪声小、隐蔽性好的优点,但目前相关航行器较少涉及流线型设计,水动力性能较差,潜航性能弱或不具备,且旋翼常位于外侧,跨介质时易损坏,反复跨介质能力也受限[8]。固定翼型航行器具有优良的空中飞行性能,作战半径大,但只具备由水入空的单介质过渡能力;为提升跨介质能力,缓解介质过渡阶段流体载荷突变带来的巨大冲击,常采用变体(折叠机翼)方式,但这对航行器的结构材料具有较高要求[9]。
在提升潜空跨介质航行器流体动力性能力学性能方面,廖保全[10]等通过改变外形来优化航行器气动/水动特性,得到了各个工况下的阻力、升力和俯仰力矩。赵英杰[11]分析了潜空航行器在运动过程中的力矩变化,验证了其在空中飞行和水中潜航的稳定性。鲍杨春[12]利用数值方法完成了潜空航行器空飞行状态下气动特性和介质跨越过程流固耦合特性分析。谭骏怡[13]对潜空航行器水下构型的出水过程进行了研究。
综上所述,潜空航行器属于多学科耦合复杂系统,它的设计和性能是不同学科之间相互影响、协同制约的综合体现。其研制涉及气动/水动、仿生、机械设计、结构机构、推进、控制等多个学科。本文拟采用仿生学、机械设计、流体力学等多学科手段,开展一种仿生潜空航行器概念设计研究。为降低跨介质过程中环境载荷突变对航行器的影响,提出软性跨介质概念,从而降低跨介质过程中航行器载荷,提升反复跨介质能力;通过仿生流线型的设计,提升跨介质航行器水下潜航性能,并通过仿生鳍作为水下推进方式,可有效提升航行器潜航时的隐蔽性能。此外,还采用数值方法进行潜航性能预报、空飞性能预报、跨介质性能以及结构安全可靠性分析。
1. 仿生构型设计研究
1.1 设计性能指标
为使得潜空航行器具备反复跨介质和多功能的新质作战能力,制定了以下4个设计目标:1)具有在空中机动飞行的能力,设计速度100 km/h,续航200 km;2)具有水下潜航能力,设计航速3 kn;3)在4级海况下可实现空入水及水入空反复介质跨越;4)可携带导弹等载荷,具备打击能力。
1.2 仿蝠鲼构型设计
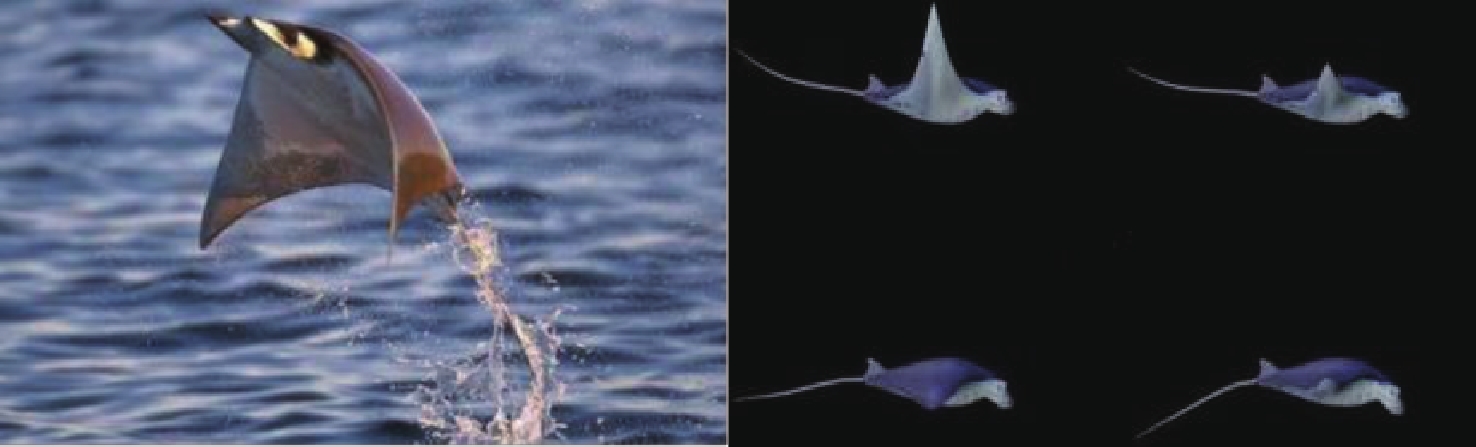
自然界中不断进化具有优异性能的海洋生物,给工程设计带来了灵感和样本。蝠鲼经过长久的自然进化,发展出了独特的形态。它们的宽阔翼展和流线型身体使它们能够在海洋中高效游动。本研究将蝠鲼作为仿生对象,提取自然进化出的有利于提升流体动力性能的外形。图1展示了蝠鲼这种鱼类,其在水中时通过摆动胸鳍推进身体的前行,这种水下推进模式相较于传统的螺旋桨推进,具有噪声低、振动小的优势[14]。
通过三维扫描,获取蝠鲼的外形特征,通过数学拟合方法可获得光顺后的特征外形,如图2所示。主体部分呈有一定厚度,截面呈椭圆形,整体略微扁平,前缘具有流线型特征。两侧鳍呈三角形,宽大且扁平。本潜空航行器采取整体扁平的概念构型设计,如图3所示,其中L为总长,B为宽度,D为厚度。
潜空航行器需安装空气飞行推进装置和水下航行推进装置,为了达到设计目标中的软性跨介质能力,在选择空气飞行推进装置时选择旋翼作为飞行的推进装置,为了增强水下潜行时的隐蔽性,采用仿生鳍作为水下推进装置,这种推进装置与海洋背景噪声相近,有利于躲避侦察[15]。
在仿生鳍的前缘布置形状记忆合金丝,并在外层覆盖硅胶,以模拟生物肌肉的收缩与放松。通过通电控制形状记忆合金的收放[17],带动仿生鳍摆动,将水推向后方,从而推动航行器前进。
仿生鳍安装在一根圆杆上,并通过电机驱动该连接杆,从而实现仿生鳍的平滑卷曲或展开,确保了仿生鳍能够在浮出水面时有效收起,以减少空气阻力。仿生鳍收放结构如图4所示。
形成如图5所示的新型潜空航行器整体外形设计方案,主尺度见表1,选择与蝠鲼相似的特征尺寸L/B为1.83,翼长S/B为0.75。此设计可根据实际使用环境、搭载的设备、导弹尺寸等因素,按比例放大或缩小,以适用于不同的任务情形。采用了布置在机体内部的涵道式四旋翼设计,在水下前进时,涵道可对旋翼起到一定的保护作用,减少水流对旋翼的冲击;同时涵道可提升旋翼空飞工作效率,拥有更大的升力。在水下时通过控制仿生鳍的摆动推进航行器前进,在空飞时仿生鳍可收至机体内部,以减小飞行时的空气阻力。
表 1 整体外形设计主尺度表Table 1. Main dimensions of the vehicle主尺度 总长 L/m 2.2 宽度 B/m 1.2 厚度 D/m 0.2 仿生鳍宽 S/m 0.9 主体体积 V/m3 0.272 旋翼直径 d/m3 0.4 在完成总体外形设计后,再对航行器内部的舱室布局进行详细规划,设计了油箱、电池、发动机、电动机、摄像头、传感器和导弹的安装位置。
航行器的内部舱室设计如图6所示,其中,燃油舱总容积约 0.8 m3,压载水舱总容积约0.84 m3。
在航行器总体设计的基础上,将以上设备合理安置在航行器内,如图7所示。
2. 软性跨介质方案研究
从当前潜空航行器在水空转换技术上的研究来看,潜空航行器入水方式大部分采用的是固定翼设计的变体溅落。溅落式的动态入水方式存在冲击大、对结构强度要求高和反复跨介质次数有限等缺点。采用旋翼驱动的下降与升空策略,对于潜空航行器出入水过程中的水体冲击力减缓具有显著效果,在潜空航行器设计中,如何高效结合这两种技术优势,以进一步优化航行器在水空交界面的动态性能和提升航行器反复跨介质能力是需要解决的关键技术[18]。
本文通过采用涵道旋翼实现下降入水和升空的软性跨介质方案,可以有效提升航行器的反复跨介质能力:
1) 由空入水。航行器首先在空中原地悬停,开始向水面降落,当传感器检测到航行器与水体距离到达设定距离时,停止旋翼转动。随后,向压载水舱注水,送出仿生鳍。当注水量达到标准后,航行器下潜进入水中航行。
2) 由水升空。航行器在水下悬停状态时排出压载水,逐渐上浮至水面。航行器的上半部浮出水面后,收起仿生鳍,并开始以较慢速度转动旋翼,甩干旋翼上粘连的水,避免影响其动力性能。在完全收起仿生鳍后,旋翼加快转速,航行器起飞,开始空中飞行。
本文设计的软性跨介质过程,航行器在介质跨越过程中不会受到较大的外部作用力,这保证了航行器主体、旋翼、支架不会因为过大的抨击而遭到损坏,这大大提高了潜空航行器在实际应用中的灵活性和适用性。
在以上跨介质方案的基础上新型潜空航行器在运行时的工况包括:
1)水下潜行。图8为潜空航行器在水下航行的示意图,在仿生鳍的前缘布置形状记忆合金(图中红线部分),仿生鳍通过模拟蝠鲼的游动方式,在水中产生推进力,推动航行器前进。在跨介质航行器需要水下转向时,可暂停一侧仿生鳍的摆动,不平衡的推力将会实现航行器的转向。
2) 水面漂浮。潜空航行器在水下航行时,如需上浮至水面,则仿生鳍停止摆动,原地悬停,开始排出压载水,在浮力的作用下,航行器逐渐上浮至水面。浮出水面后,航行器可使用发动机为蓄电池充电;当需要起飞至空中时,则收起仿生鳍,为起飞做好准备。
3) 空中飞行。图9为潜空航行器在空中飞行的示意图。本航行器采用涵道式四旋翼布局设计,这种旋翼布局的可靠性已在无人机上得到了验证。在空中飞行时,通过控制旋翼的转速差,使产生不同的升力和扭矩,进而控制航行器在空中的运动(前进、后退、旋转)和姿态(前倾、后仰)。
4)空中悬浮攻击。航行器在空中飞行时,接收远程控制指令,接近并侦测到打击目标。原地悬停,并旋转一定角度,将导弹舱口转向至目标所在方位,打开导弹舱口盖,并发射导弹对目标进行打击。
3. 潜空航行器性能研究
对潜空航行器的流体动力性能进行了研究:1)航行器在水下潜航时通过仿生鱼鳍的摆动产生前进的动力,计算得出鱼鳍产生的推力和航行器水下速度-阻力曲线,通过对比两者预报最大潜航速度;2)对航行器在空飞能力进行了研究,开展了旋翼的推力和航行器空中速度-阻力曲线计算,对比二者预报航行器的最大航速;3)为实现空入水及水入空反复介质跨越,设计了航行器软性跨介质方案,开展了航行器空转水载荷和结构强度预报,研究了航行器的反复跨介质能力。
3.1 水下快速性性能预报
3.1.1 水下阻力预报
流体的流动遵循着质量守恒定律和动量守恒定律。质量守恒定律表明,在一定时间内,微团流入质量等于流出质量。质量守恒的三维瞬态表达式为
∂ρ∂t+∂(ρu)∂x+∂(ρv)∂y+∂(ρw)∂z=0 (1) 式中:u,v,w分别为流体速度在坐标轴各方向的分量;ρ为流体密度。
动量守恒定律意指作用在微团上的外力和等于该微团内动量变化率。由牛顿内摩擦定律可知,流体的剪切应力与流体变形率成正比,因此动量守恒表达式为
\frac{{\partial \left( {\rho u} \right)}}{{\partial t}} + \nabla \cdot \left( {\rho u{\boldsymbol{U}}} \right) = - \frac{{\partial P}}{{\partial x}} + {S_u} + \nabla \cdot \left( {\mu \nabla u} \right) (2) \frac{{\partial \left( {\rho v} \right)}}{{\partial t}} + \nabla \cdot \left( {\rho v{\boldsymbol{U}}} \right) = - \frac{{\partial P}}{{\partial x}} + {S_v} + \nabla \cdot \left( {\mu \nabla v} \right) (3) \frac{{\partial \left( {\rho w} \right)}}{{\partial t}} + \nabla \cdot \left( {\rho w{\boldsymbol{U}}} \right) = - \frac{{\partial P}}{{\partial {\textit{z}}}} + {S_w} + \nabla \cdot \left( {\mu \nabla w} \right) (4) 式中:\nabla 为向量算子;U为速度矢量;ρ和P分别为流体密度和作用在微团上的压力;S为广义源项;μ为流体动力黏度。
本文选用雷诺平均方程(RANS)配合特定的湍流模型进行求解,计算流体力学中常用的湍流模型有标准k-ω模型和k-ε模型,k-ω模型相比标准k-ε模型能够很好地表达跨介质航行器的尾部流场[19],因此本文的湍流模型选用基于SST的k-ω模型,其考虑了湍流剪切应力的传播,并且同样具备k-ω模型对于远场计算的优点,收敛效果好[20]。
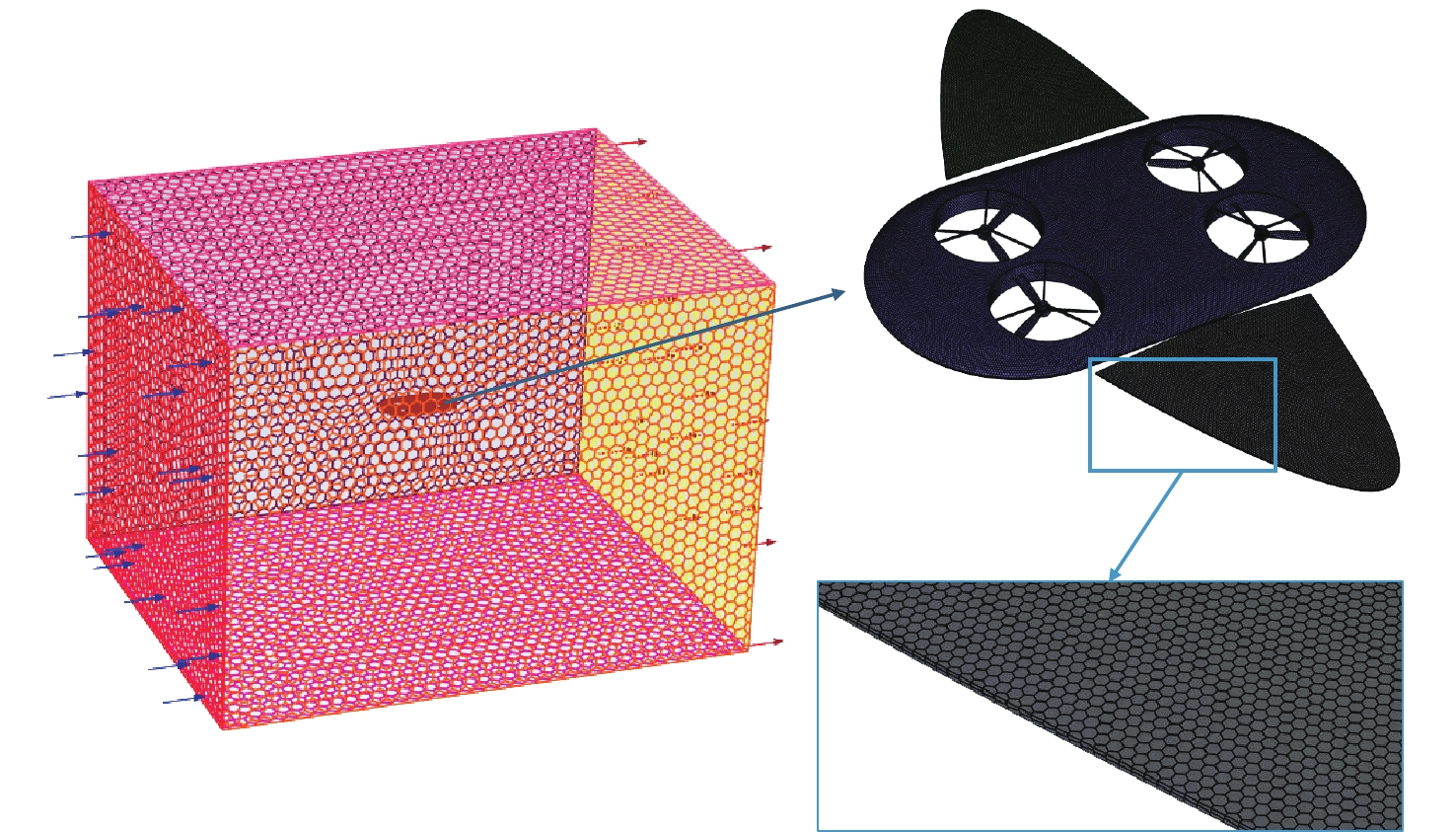
为了减少计算域边界对结果的影响,计算域确定为远大于几何模型的13.2 m×12.5 m×12.5 m(6L×5L×5L)长方体,航行器距计算域速度入口为5.5 m(>2L)。采用非结构化网格、相对运动的方式对航行器水下阻力进行计算,图10为计算域和网格划分图。
为了验证CFD计算方法的有效性,对Myring型水下航行器的阻力进行了仿真计算,表2对比了本文CFD计算结果和文献[21]研究结果。由表2可以看出,本文计算结果与文献[21]相差2.5%,与理论值相差2.9%,验证了本文仿真方法的可靠性。
表 2 阻力计算结果对比Table 2. Comparisons of calculation results潜空航行器以3 kn的匀速直线运动时,选择数量为906 000,1 655 000,1 902 000的3组网格,进行仿真计算,根据此时航行器受到的阻力来判断网格密度对仿真精度的影响。数值仿真的网格数量与阻力关系如表3所示。
表 3 网格数量和阻力关系Table 3. Relationship between the Grids and Resistance网格数量 阻力/N 906 000 120.48 1 655 000 126.37 1 902 000 127.57 由表3可见,网格数越多,阻力越大。在潜空航行器网格尺寸为8 mm、流体域最大网格尺寸为394 mm、最小网格尺寸为10 mm、网格总量为165.5×104时,航行器、阻力为126.37 N,与网格数量最多时的阻力127.57 N相比,相差0.9%,仿真精度满足要求。后续阻力计算均采用165.5×104网格数量,潜航速度取为1,2,3和4 kn。
航行器在水下航行的压力云图如图11所示,可见航行器涵道内部压力较小,对旋翼起到较好的保护作用。从图12可以看出,随着航速增加,航行器的阻力逐渐增大,阻力增幅也在增加。在所设定的航行器设计航速范围内(<3 kn),阻力值变化较缓慢,超过3 kn后航行器阻力明显增大。考虑到航行器在水下以隐蔽航行为主,结合节约能源的需求,设定航行器最大航速不大于3 kn。
3.1.2 水下仿生推进推力预报
在蝠鲼的直线游动中,通过胸鳍的波动产生推力,这种波动形成了一种与游动方向相反的行波。为了进行推力仿真计算,需要确定仿生鳍运动方程。由于生物运动的复杂性,鳍面的变化无法用方程精确表示,需要对其进行简化处理。陈志远[22]采用形状记忆合金,实现了仿生鳍的运动模拟,并推导了仿生鳍运动方程。参考该研究成果,本文采用如下运动方程描述仿生鳍的运动。
如图13所示,以仿生鳍展开方向为Y轴,X轴沿着航行器前进的方向,Z轴垂直于仿生鳍所在的平面。可以得到鳍面与Y轴的夹角:
\theta = A \cdot \sin \left( {\omega t + \varphi } \right) (5) 式中:ω为仿生鳍摆动角频率;A为最大摆角;\varphi 为仿生鳍在x方向上不同位置的相位差。
\varphi = \frac{{2{\text{π}}x}}{\lambda } + {\varphi _0} (6) 式中: {\varphi _0} 为x=0时的初始相位;λ为运动波长。
结合式(5)和式(6),可以得到鳍面上每个点的坐标变换方程,设初始点为 \left( {{x_0},{y_0},{{\textit{z}}_0}} \right) ,运动之后的坐标为
\left\{ \begin{aligned} & {{\textit{z}} = y\tan \theta + {{\textit{z}}_0}} \\ & {y = {y_0}\cos \theta } \\ & {x = {x_0}} \end{aligned}\right. (7) 由方程(7)确定鳍面上每个点的坐标,通过坐标变换,可以实现鳍面的运动模拟。
基于以上运动方程进行仿真计算,验证仿生鱼鳍的推力能否满足航速需求。采用Fluent动网格技术,对仿生鱼鳍产生的推力进行计算[23],图14为推力预报仿真模型。
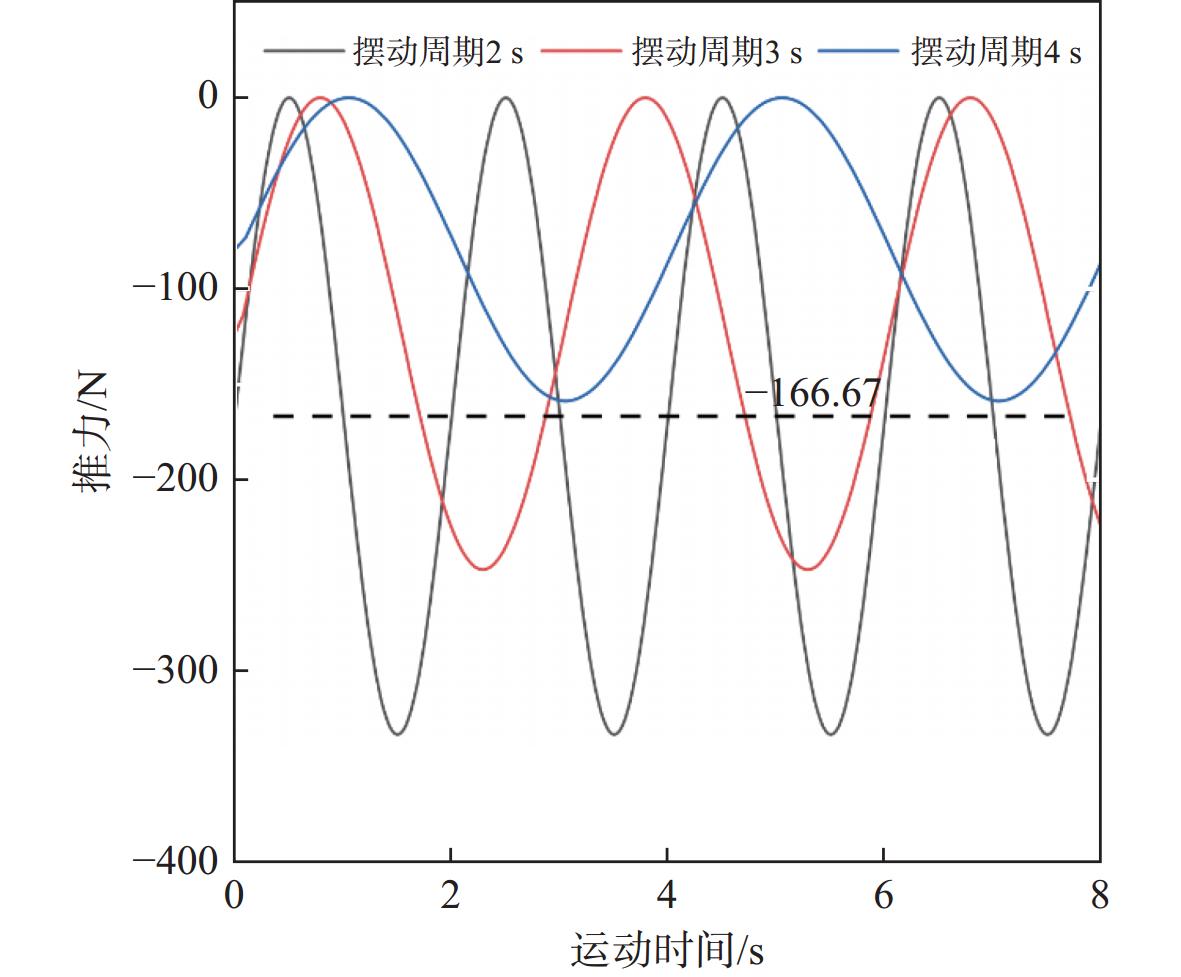
根据观察蝠鲼游动行为发现,蝠鲼以3 kn速度前进时,摆动周期约为2~4 s,摆动角度约为10~20°。因此,本文对航行器摆动周期分别为2,3,4 s,摆动角度分别为10°,15°,20°的参数组合进行仿真计算。仿生鳍在摆动周期为2 s、最大摆动角度(单向)为15°时的推力计算结果如图15所示。由图可见,仿生鱼鳍在该条件下能够提供平均166.67 N推力(双鳍),大于航行器目标航速为3 kn时受到的阻力126.37 N,满足潜航速度性能需求。此外,从图16所示航行器推力计算流线图也可以看出,仿生鳍与航行器主体相近处流场与其他位置存在明显差异,即采用组合体进行计算可以考虑到结构物间的相互干扰。
3.2 空飞性能预报
3.2.1 空气阻力预报
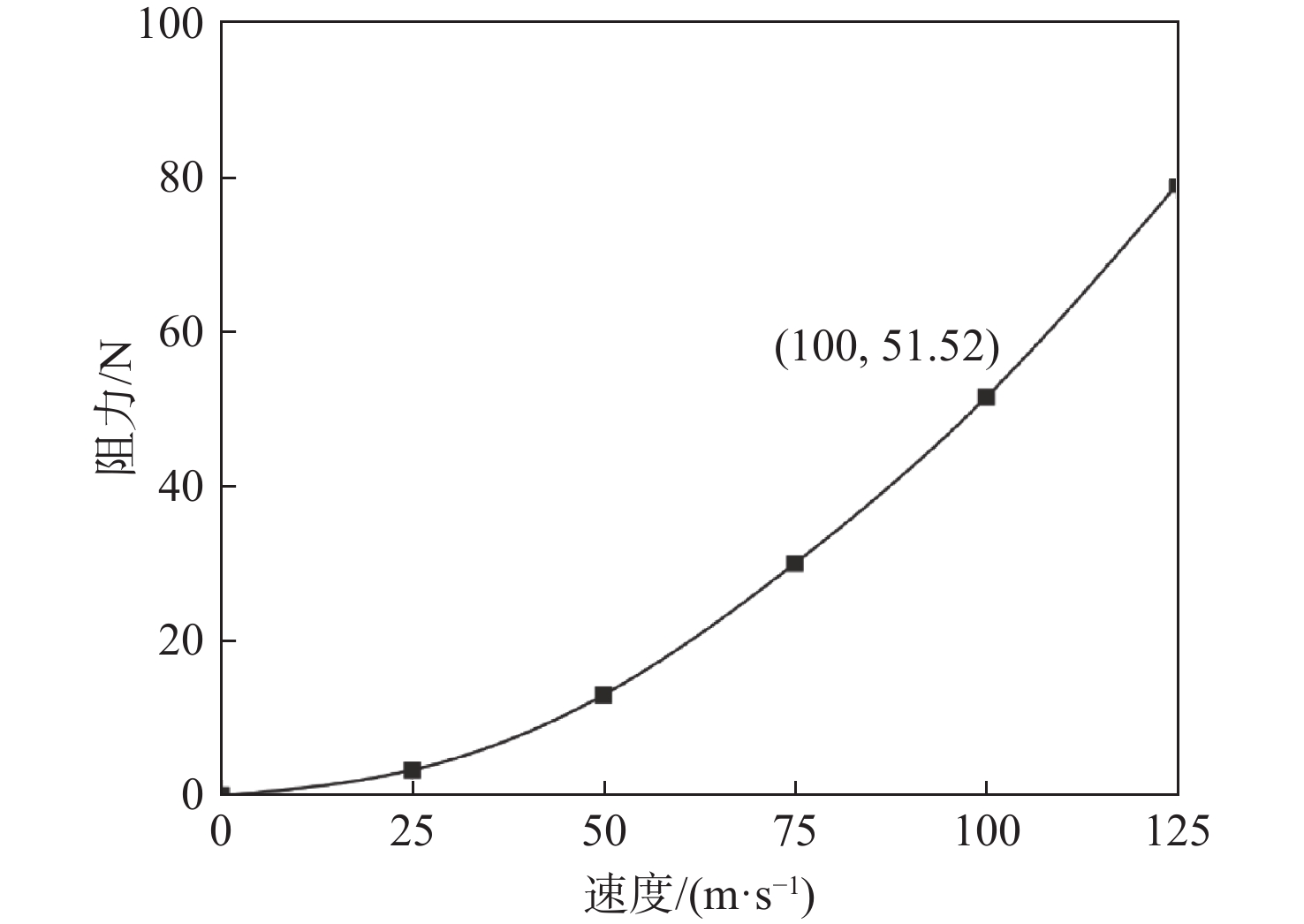
设置流体域为空气,采用相对运动的方式对航行器空气阻力进行计算。由于设计的飞行速度为0.028 Ma,远低于1 Ma,所以不考虑空气的可压缩性。计算攻角取7°,飞行速度取25,50,75,100和125 km/h。计算结果如图17所示。由阻力结果可知,随着飞行速度增加,航行器的阻力逐渐增大,飞行速度为100 km/h时阻力为51.52 N。
3.2.2 涵道螺旋桨推力预报
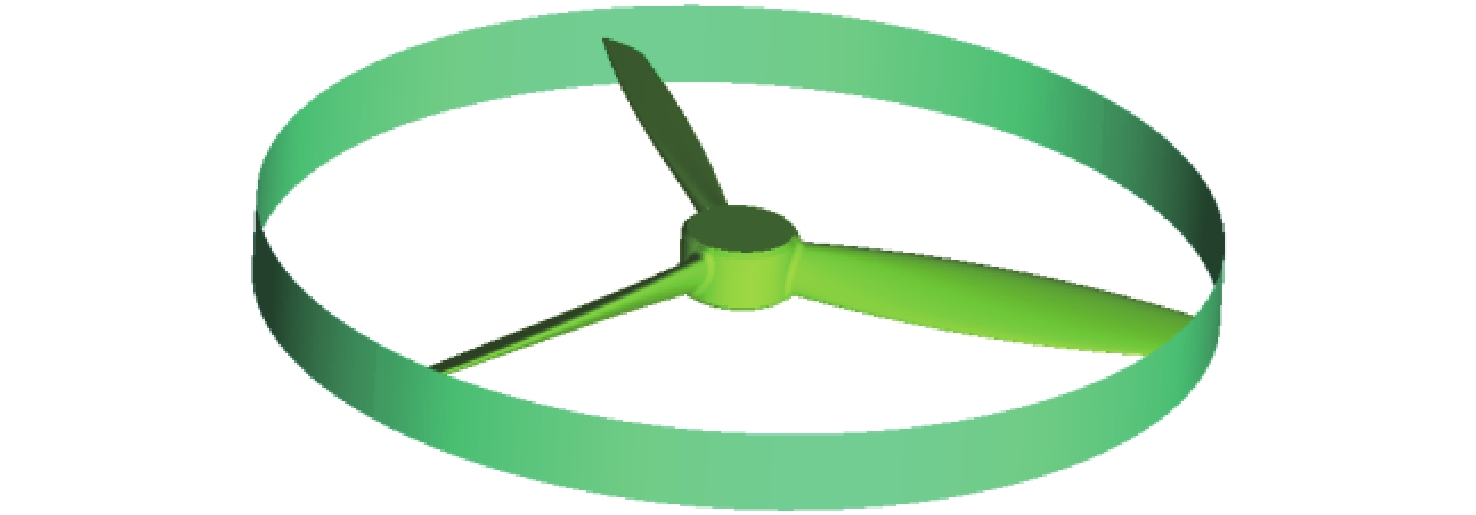
旋翼模型如图18所示,采用三叶旋翼,旋翼直径为0.4 m,与涵道间距为0.005 m。
为了保证航行器旋翼的推力满足航行器在空中飞行的航速指标,需要确定旋翼的转速。基于Fluent中的MRF模型开展推力计算,旋翼转速取3 000 r/min。仿真模型如图19所示,静止域和旋转域分别采用结构网格和非结构网格[24]。
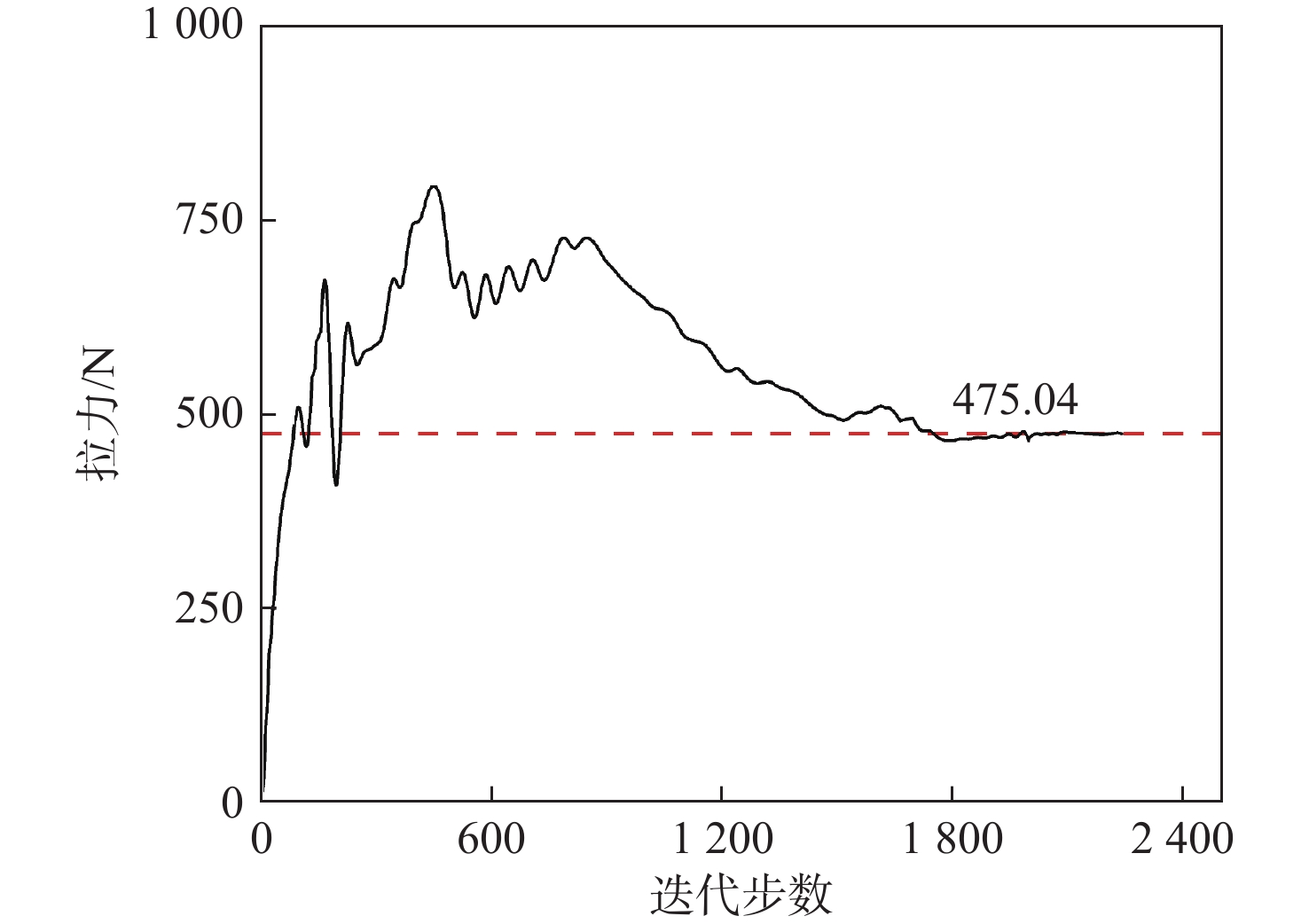
航行器单个旋翼拉力计算结果如图20所示,可见单个旋翼在3 000 r/min的转速下能够提供475.04 N的拉力,4个旋翼可提供1 900.16 N拉力。当航行器攻角为7°时,可提供约231.57 N的向前推力,大于航行器的目标航速100 km/h时受到的阻力为51.52 N,即该旋翼能够满足空飞速度性能需求。
进一步计算可知,当航行器旋翼攻角为7°时,可为航行器提供
1886 N的升力,由升阻比计算公式K=L/D,可得航行器升阻比为36.61,表明该航行器具有良好的空飞性能。3.2.3 涵道螺旋桨升力验证
由前面计算可知,当航行器旋翼攻角为7°时,可提供1 886 N的升力。为保证螺旋桨升力能够满足航行器需求,拟采用3 mm铝合金作为航行器主体材料,航行器外壳重量31 kg,预估航行器上设备重量63 kg,其中燃油重量20 kg,电池重量20 kg,导弹重量15 kg[25]。航行器空飞时重量约为126 kg,航行器空飞重力1 236.06 N,该旋翼能够满足空飞升力需求。
3.3 跨介质性能预报
3.3.1 空转水载荷预报
为了验证潜空航行器在四级海况下由空入水过程的可靠性,本文采用Fluent对跨介质航行器由空入水的载荷进行了预报。
四级海况波高一般为1.25~2.50 m,因此为保证航行器在该海况下正常完成空转水跨介质过程,本文模拟航行器在距离水面3 m高处关停旋翼做自由落体运动,验证航行器在该高度掉落水面结构强度是否满足要求。
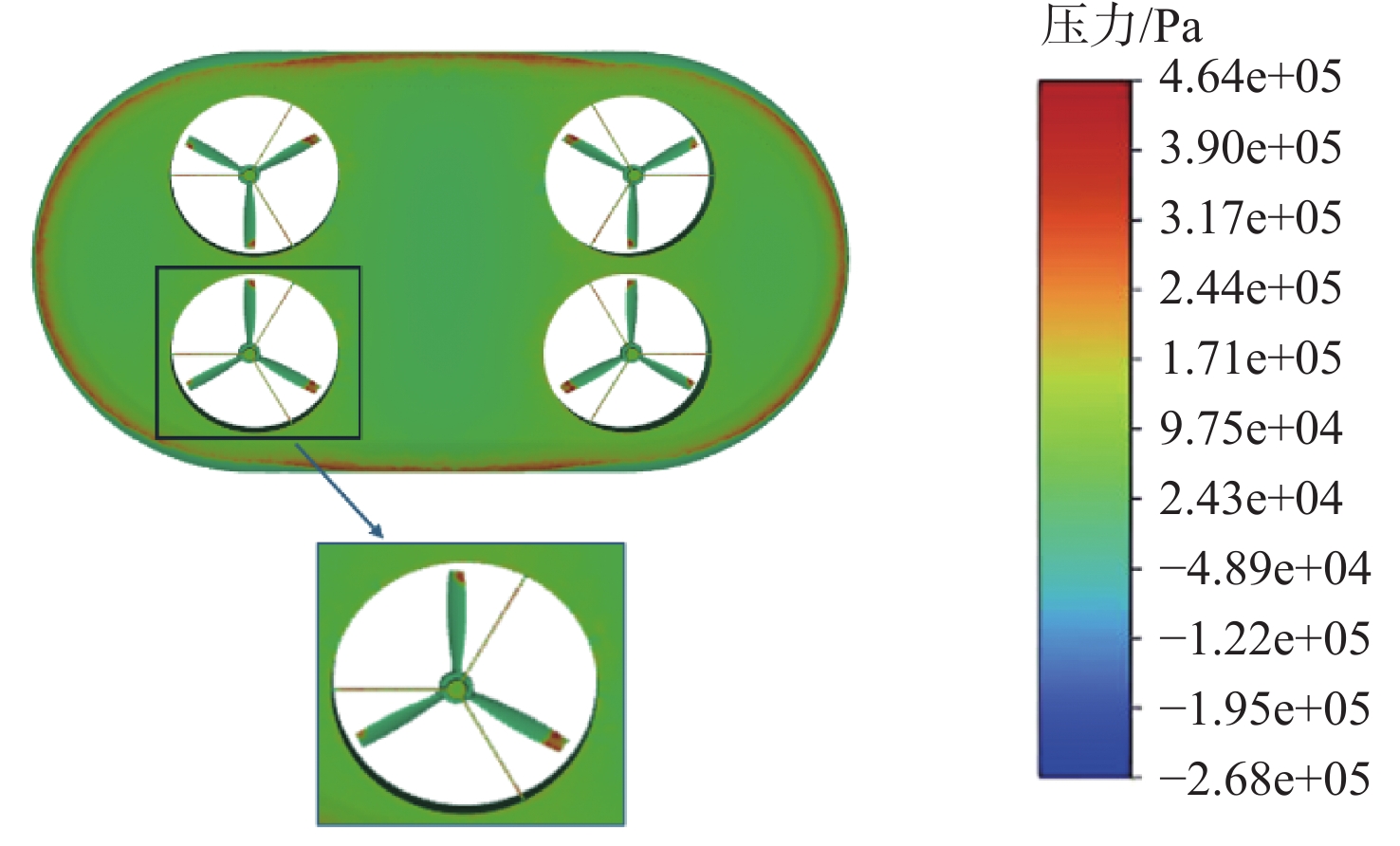
由图21所示的压力分布云图可知,在航行器主体边缘、旋翼和支架处均产生了抨击水压,局部最大压力可达0.464 MPa,航行器底面平均压力约为0.171 MPa。
3.3.2 结构强度分析
为了验证抨击水压对航行器结构强度的影响,为后续航行器主体材料选择提供参考,本文使用ANSYS-Mechanical对航行器的结构强度进行计算。结构强度仿真计算采用铝合金作为航行器主体材料,碳纤维作为旋翼及其支架材料,材料属性如表4所示。
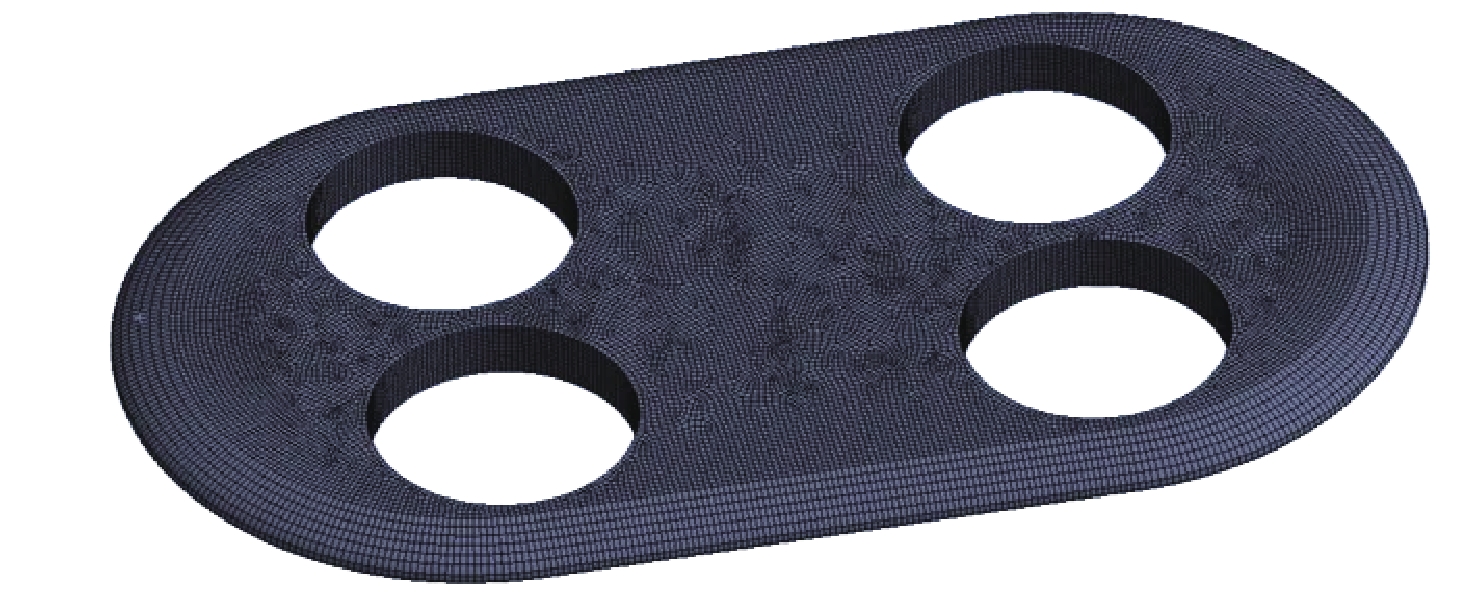
表 4 材料属性Table 4. Material Properties材料 密度/(kg·m−3) 泊松比 杨氏模量/MPa 铝合金 26 400 0.33 200×103 碳纤维 2 000 0.30 230×103 航行器主体网格划分如图22所示,在模型底部施加P1=0.171 MPa均匀载荷;在模型边缘施加P2=0.464 MPa均匀载荷,对整个模型施加标准重力G,并对航行器边缘进行约束。
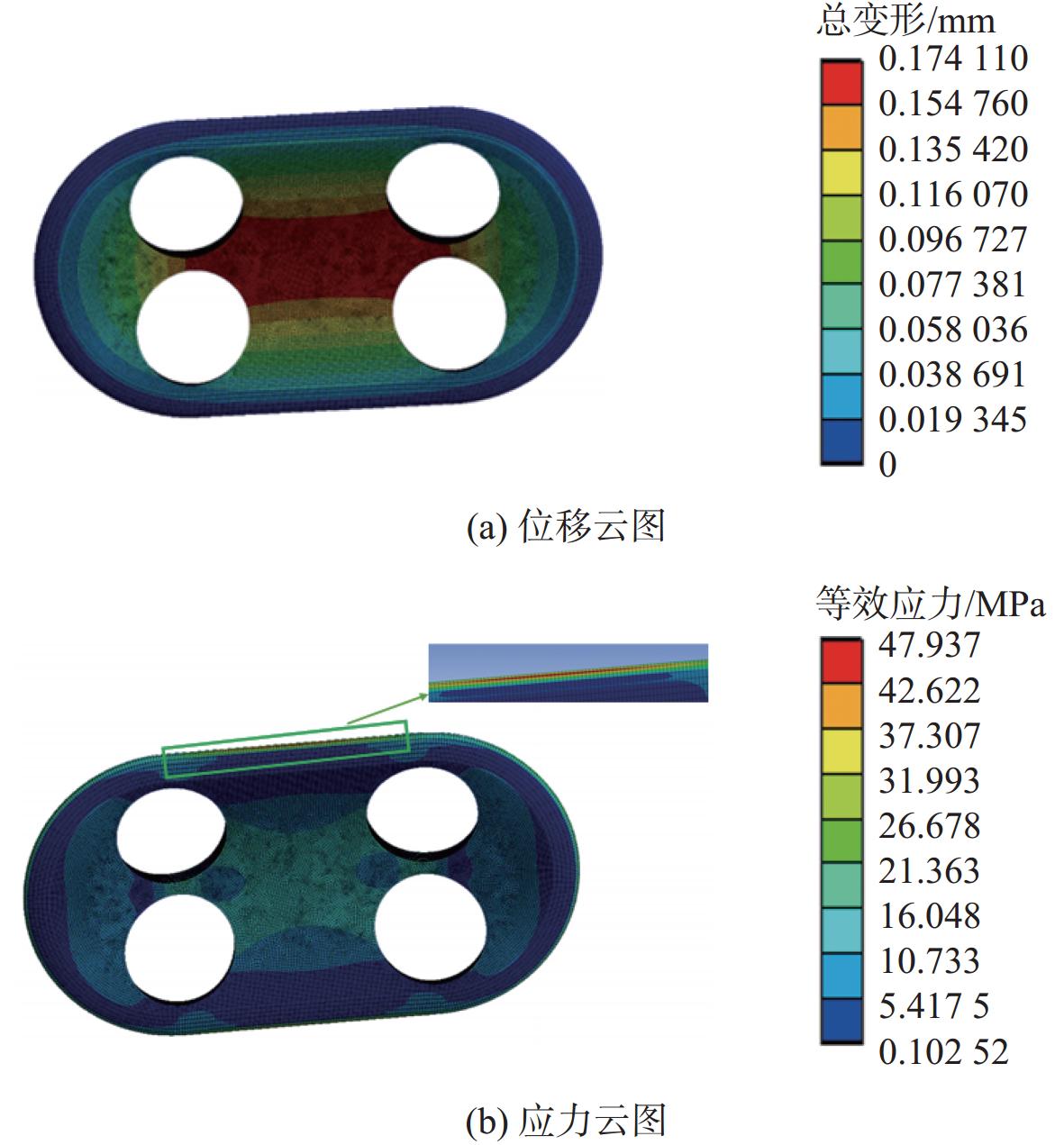
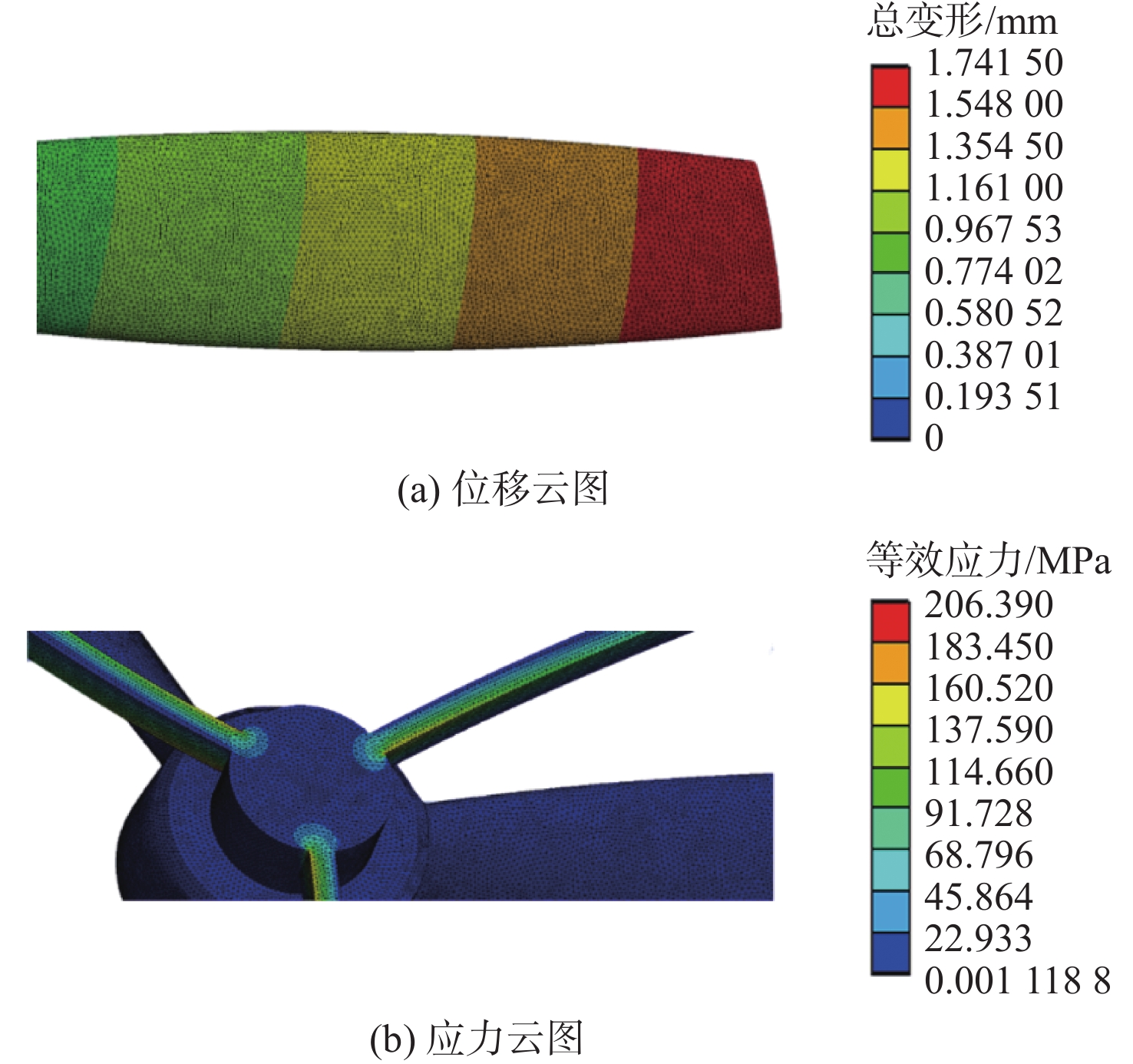
由图23(a)所示位移云图可知,航行器最大位移发生在航行器中部红色处,最大位移值为0.174 11 mm。由图23(b)所示的应力云图可知,航行器最大应力发生在边缘位置附近,最大应力值为47.937 MPa。
此外,对旋翼结构强度进行校核,在旋翼及支架正面施加P=0.464 MPa均匀载荷,对整个模型施加标准重力G,并对支架端面进行约束。
图24所示为得到的旋翼支架位移和应力云图。由图24可知,旋翼最大位移发生在距离旋转轴最远处边缘,最大位移为1.741 5 mm;支架最大应力发生在与底座连接位置附近,最大应力值为206.39 MPa。
4. 结 论
本文提出了一种基于软性跨介质方案的潜空航行器设计方案,并基于CFD流体仿真技术和有限元分析方法,开展了航行器水下航行性能、空飞性能和反复跨介质性能研究。得到以下主要结论:
1) 通过数值仿真研究,该航行器在水下运动时仿生鱼鳍摆动周期为2 s,最大摆动角度为15°,可以保证航行器水下航速大于3 kn。
2) 空中飞行时采用四旋翼,旋翼直径0.4 m,涵道间距设置为0.005 m,当潜空航行器飞行攻角为7°,旋翼转速取3 000 r/min时,航行器空飞航速可大于100 km/h。
3) 空转水时平均载荷为0.171 MPa,在旋翼和结构突变边缘处产生了0.464 MPa的压力。为验证航行器的结构强度,计算了对航行器底部中心施加0.171 MPa的载荷和在航行器边缘施加0.464 MPa载荷时的结构强度,最大应力发生在涵道旋翼边缘,应力值为47.937 MPa,铝合金许用应力为100 MPa,采用铝合金材料满足结构安全需求;旋翼支架最大应力发生在与底座连接位置附近,最大应力值为206.39 MPa,碳纤维许用应力为1 000 MPa,采用碳纤维满足结构强度需求。
通过研究可知,软性跨介质方案有效减轻了介质转换时的冲击,可有效提高航行器多次重复跨介质能力,并为后续航行器材料选型及航行器样机制造提供了参考。
-
表 1 整体外形设计主尺度表
Table 1 Main dimensions of the vehicle
主尺度 总长 L/m 2.2 宽度 B/m 1.2 厚度 D/m 0.2 仿生鳍宽 S/m 0.9 主体体积 V/m3 0.272 旋翼直径 d/m3 0.4  下载: 导出CSV
下载: 导出CSV
表 2 阻力计算结果对比
Table 2 Comparisons of calculation results
下载: 导出CSV
表 3 网格数量和阻力关系
Table 3 Relationship between the Grids and Resistance
网格数量 阻力/N 906 000 120.48 1 655 000 126.37 1 902 000 127.57
下载: 导出CSV
表 4 材料属性
Table 4 Material Properties
材料 密度/(kg·m−3) 泊松比 杨氏模量/MPa 铝合金 26 400 0.33 200×103 碳纤维 2 000 0.30 230×103
下载: 导出CSV
-
[1] 齐铎, 冯金富, 李永利. 具有水空介质跨越能力的反舰武器[J]. 飞航导弹, 2014(11): 78–80, 96. QI D, FENG J F, LI Y L. Anti-ship weapon with the capability of crossing water and air media[J]. Aerodynamic Missile Journal, 2014(11): 78–80, 96 (in Chinese).
[2] YAO G C, LIANG J H, WANG T M, et al. Submersible unmanned flying boat: design and experiment[C]//2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014). Bali, Indonesia: IEEE, 2014: 1308-1313.
[3] 陈怀远. 跨介质飞行器设计及流体动力学特性分析[D]. 南京: 南京航空航天大学, 2019. CHEN H Y. The design and analysis of fluid dynamic characteristics for submersible unmanned aerial vehicle[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2019 (in Chinese).
[4] LÜ C X, LU D, XIONG C K, et al. Toward a gliding hybrid aerial underwater vehicle: design, fabrication, and experiments[J]. Journal of Field Robotics, 2022, 39(5): 543–556. doi: 10.1002/rob.22063
[5] ALZU'BI H, MANSOUR I, RAWASHDEH O. Loon copter: implementation of a hybrid unmanned aquatic-aerial quadcopter with active buoyancy control[J]. Journal of Field Robotics, 2018, 35(5): 764–778. doi: 10.1002/rob.21777
[6] ROCKENBAUER F M, JEGER S, BELTRAN L, et al. Dipper: a dynamically transitioning aerial-aquatic unmanned vehicle[C]// Robotics: Science and Systems. 2021: 12-16.
[7] 刘相知, 崔维成. 潜空两栖航行器的综述与分析[J]. 中国舰船研究, 2019, 14(增刊2): 1–14. doi: 10.19693/j.issn.1673-3185.01901 LIU X Z, CUI W C. An overview and analysis of the water-air amphibious vehicles[J]. Chinese Journal of Ship Research, 2019, 14(Supp 2): 1–14 (in both Chinese and English). doi: 10.19693/j.issn.1673-3185.01901
[8] 姚熊亮, 赵斌, 马贵辉. 跨介质航行体出水问题研究现状与展望[J]. 航空学报, 2024, 45(14): 118–143. doi: 10.7527/S1000-6893.2023.29598 YAO X L, ZHAO B, MA G H. Research status and prospect of cross-media vehicle water exit[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(14): 118–143 (in Chinese). doi: 10.7527/S1000-6893.2023.29598
[9] WANG X Y, YANG X B, ZHAO Z W, et al. Aquatic unmanned aerial vehicles (AquaUAV): bionic prototypes, key technologies, analysis methods, and potential solutions[J]. Science China Technological Sciences, 2023, 66(8): 2308–2331. doi: 10.1007/s11431-022-2142-9
[10] 廖保全, 冯金富, 齐铎, 等. 一种可变形跨介质航行器气动/水动特性分析[J]. 飞行力学, 2016, 34(3): 44–47,57. doi: 10.13645/j.cnki.f.d.20160229.012 LIAO B Q, FENG J F, QI D, et al. Aerodynamic and hydrodynamic characteristics analysis of morphing submersible aerial vehicle[J]. Flight Dynamics, 2016, 34(3): 44–47,57 (in Chinese). doi: 10.13645/j.cnki.f.d.20160229.012
[11] 赵英杰. 小型无人跨介质航行器结构设计及动力学特性分析与仿真[D]. 哈尔滨: 哈尔滨工程大学, 2021. ZHAO Y J. Structural design and dynamic characteristics analysis and simulation of small trans-media unmanned vehicle[D]. Harbin: Harbin Engineering University, 2021 (in Chinese).
[12] 鲍杨春. 跨介质航行器流体动力外形组合仿生设计与气动特性分析[D]. 长春: 吉林大学, 2019. BAO Y C. Combinatorial biomimetic design of fluid dynamic shape and analysis of aerodynamic characteristics for cross-media UAV[D]. Changchun: Jilin University, 2019 (in Chinese).
[13] 谭骏怡, 胡俊华, 陈国明, 等. 水空跨介质航行器斜出水过程数值仿真[J]. 中国舰船研究, 2019, 14(6): 104–121. doi: 10.19693/j.issn.1673-3185.01519 TAN J Y, HU J H, CHEN G M, et al. Numerical simulation of oblique water-exit process of trans-media aerial underwater vehicle[J]. Chinese Journal of Ship Research, 2019, 14(6): 104–121 (in Chinese). doi: 10.19693/j.issn.1673-3185.01519
[14] 曹勇, 曹永辉, 黄桥高, 等. 水下仿生扑翼机器人的发展现状综述[J]. 数字海洋与水下攻防, 2023, 6(4): 380–405. doi: 10.19838/j.issn.2096-5753.2023.04.001 CAO Y, CAO Y H, HUANG Q G, et al. A review of the underwater bionic flapping wing robots[J]. Digital Ocean & Underwater Warfare, 2023, 6(4): 380–405 (in Chinese). doi: 10.19838/j.issn.2096-5753.2023.04.001
[15] 云忠, 蒋毅, 李静. 仿蝠鲼胸鳍推进执行机构水动力特性分析[J]. 合肥工业大学学报(自然科学版), 2018, 41(1): 7–11,22. YUN Z, JIANG Y, LI J. Analysis of hydrodynamic characteristics of pectoral fin actuator for bionic manta ray[J]. Journal of Hefei University of Technology (Natural Science), 2018, 41(1): 7–11,22 (in Chinese).
[16] 王佳茂, 杨鹏, 李静茹. 蝠鲼仿生型多模块UUV的水动力分析及能量捕获效能研究[J]. 中国舰船研究, 2023, 18(6): 106–118. doi: 10.19693/j.issn.1673-3185.03019 WANG J M, YANG P, LI J R. Hydrodynamic analysis and energy capture efficiency of multi-module bionic manta ray UUV[J]. Chinese Journal of Ship Research, 2023, 18(6): 106–118. doi: 10.19693/j.issn.1673-3185.03019
[17] 王扬威, 王振龙, 李健, 等. 形状记忆合金驱动仿生蝠鲼机器鱼的设计[J]. 机器人, 2010, 32(2): 256–261. doi: 10.3724/SP.J.1218.2010.00256 WANG Y W, WANG Z L, LI J, et al. Development of a biomimetic manta ray robot fish actuated by shape memory alloy[J]. Robot, 2010, 32(2): 256–261 (in Chinese). doi: 10.3724/SP.J.1218.2010.00256
[18] 陈建峰, 张军. 海/空跨介质无人平台发展现状与应用构想[J]. 中国造船, 2024, 65(2): 265–277. doi: 10.3969/j.issn.1000-4882.2024.02.024 CHEN J F, ZHANG J. Development of unmanned underwater-aerial cross-domain vehicles and application conceptions[J]. Shipbuilding of China, 2024, 65(2): 265–277 (in Chinese). doi: 10.3969/j.issn.1000-4882.2024.02.024
[19] 吴志聪. 微小型水下航行器水动力性能研究[D]. 上海: 上海海洋大学, 2020. WU Z C. Research on hydrodynamic performance of micro-small underwater vehicle[D]. Shanghai: Shanghai Ocean University, 2020 (in Chinese).
[20] 吕达, 苏浩秦, 李筠, 等. 变形仿生飞翼跨介质无人机外形设计与航行仿真[J]. 兵器装备工程学报, 2022, 43(12): 59–66. doi: 10.11809/bqzbgcxb2022.12.009 LÜ D, SU H Q, LI Y, et al. Configuration design and navigation simulation of deformable bionic flying-wing aerial-aquatic unmanned vehicles[J]. Journal of Ordnance Equipment Engineering, 2022, 43(12): 59–66 (in Chinese). doi: 10.11809/bqzbgcxb2022.12.009
[21] 王光越. 基于FLUENT水下航行器阻力特性分析[J]. 现代机械, 2024(4): 7–10. WANG G Y. Analysis of resistance characteristics of underwater vehicles based on FLUENT[J]. Modern Machinery, 2024(4): 7–10.
[22] 陈志远. SMA驱动的仿生蝠鲼设计及其实验研究[D]. 哈尔滨: 哈尔滨工业大学, 2021. CHEN Z Y. Design and experimental research on bionic manta ray driven by SMA[D]. Harbin: Harbin Institute of Technology, 2021 (in Chinese).
[23] 刘芳芳, 杨灿军, 苏琦, 等. 仿生鱼鳍运动仿真分析及试验研究[J]. 机械工程学报, 2010, 46(19): 24–29. doi: 10.3901/JME.2010.19.024 LIU F F, YANG C J, SU Q, et al. Simulation analysis and experimental research on the movements of biomimetic fin[J]. Journal of Mechanical Engineering, 2010, 46(19): 24–29 (in Chinese). doi: 10.3901/JME.2010.19.024
[24] 熊钊. 四旋翼无人机近面效应的数值模拟研究与分析[D]. 昆明: 昆明理工大学, 2023. XIONG Z. Numerical simulation and analysis of near-surface effect of four-rotor UAV[D]. Kunming: Kunming University of Science and Technology, 2023 (in Chinese).
[25] 丛敏, 张婵. 国外微小型导弹发展现状[J]. 飞航导弹, 2011(10): 1–8. doi: CNKI:SUN:FHDD.0.2011-10-002 CONG M, ZHANG C. The current development status of micro-miniature missiles abroad[J]. Aerodynamic Missile Journal, 2011(10): 1–8. doi: CNKI:SUN:FHDD.0.2011-10-002


计量
- 文章访问数: 146
- HTML全文浏览量: 65
- PDF下载量: 8
