
Adaptive tracking control for sail-assisted vehicles based on rotor rate regulation

-
摘要:目的
针对时变海洋环境干扰与信号传输受限条件下风帆助航船舶的路径跟踪问题,提出一种基于转筒速率调节的帆式船舶自适应跟踪控制算法。
方法首先,在改进传统LVS制导原理的基础上构建一种基于有限边界圆的干预LVS制导律,以有效降低制导系统的通信负载并抑制输入饱和现象;然后,采用径向基神经网络对系统不确定项进行在线逼近,通过融合动态面控制技术,避免了“计算复杂度爆炸”的问题;接着,结合鲁棒神经阻尼和自适应技术,设计一种基于积分事件触发机制的鲁棒自适应控制算法,以显著减少控制命令的频繁传输和执行器的机械磨损;最后,运用Lyapunov理论证明所提控制算法是否能够保证所有误差信号满足半全局一致最终有界稳定(SGUUB),并在模拟海洋环境干扰的情形下进行数值仿真实验。
结果结果表明,所提风帆助航策略在4级海况下可实现11.6%的推进能效提升,并展现出了低通信负载和强鲁棒性的路径跟踪特性。
结论所做研究可为船舶绿色化转型提供切实可行的技术路径。
Abstract:ObjectivesWith the intensification of the global energy crisis and environmental degradation issues, the development of low-carbon shipping technology has become an inevitable trend in the transformation of the shipping industry. As a result, the application of the sail-assisted vehicles, which harness the power of wind energy, has gradually become a prominent research topic globally. However, despite the promising potential of sail-assisted vehicles, challenges such as time-varying marine environmental disturbances and limited signal transmission significantly affect their path following control performance. Traditional control strategies often struggle to address the complexities of ocean dynamics and communication constraints, resulting in reduced tracking accuracy and energy efficiency. To overcome these limitations, this study proposes an adaptive tracking control algorithm based on rotor rate regulation for the rotor-assisted vehicles, which utilize the Magnus effect generated by rotating drum sails to achieve efficient propulsion and possess advantages such as simple structure and strong environmental adaptability.
MethodsFirstly, a modified guidance law is constructed by improving the traditional logic virtual ship (LVS) guidance principle. This improvement involves the incorporation of an intervention method based on a finite boundary circle, which effectively reduces the communication load of the guidance system. The modified guidance law ensures that when the vessel enters the coverage area of the boundary circle, the guidance signal is no longer updated, thus preventing unnecessary signal transmission and conserving communication resources. Meanwhile, to address the issue of actuator input saturation, a saturation compensation function is integrated into the guidance law, which helps to ensure that the system remains within the operational limits of the actuators, thus enhancing the robustness of the control system. Secondly, the radial basis function (RBF) neural networks are employed for the online approximation of the system uncertainties. The RBF neural networks can respond in real time to the changing dynamic conditions, thereby providing an effective mechanism to compensate for unmodeled dynamics or external disturbances that may affect the vessel’s tracking trajectory. To avoid the “explosion of computational complexity” inherent in traditional backstepping control, the dynamic surface control (DSC) technique is introduced. This technique simplifies the control law by using first-order filters, which significantly reduces the computational burden and prevents the growth of intermediate variables that would otherwise increase the computational complexity. Furthermore, a robust adaptive control algorithm is designed by combining neural damping and adaptive techniques. This is coupled with an integral event-triggered mechanism, which is particularly important in dealing with slight fluctuations in system states. Traditional event-triggered mechanisms, which rely on instantaneous state measurements, may fail to trigger updates in cases of minor state fluctuations, leading to long periods without signal updates, thus degrading the system’s closed-loop performance. The proposed integral event-triggered mechanism can effectively avoid long periods of non-triggering caused by minor state fluctuations. Its triggering effect is more natural and efficient, thus significantly reducing the frequent transmission of control commands and mechanical wear of actuators. Finally, the stability of the proposed control algorithm is rigorously analyzed using the Lyapunov theory to guarantee that all error signals are semi-global uniform and ultimately bounded (SGUUB). To validate the proposed control strategy, numerical simulations are conducted in the MATLAB, where the marine environmental disturbance under a sea state level of 4 is simulated based on the NORSOK wind spectrum and the JONSWAP wave spectrum.
ResultsThe results of the simulations demonstrate that the proposed algorithm significantly enhances the path following performance of sail-assisted vehicles. The proposed algorithm exhibits high control accuracy and fast response, maintaining the position and heading errors within a range of ±3 m and ±5°, respectively. Notably, due to the introduction of the event-triggered mechanism and the servo systems, the control inputs remain within the allowable range of actuator operations and signal chattering is significantly reduced, effectively minimizing mechanical wear on the actuators. Additionally, the adaptive laws embedded in the control algorithm demonstrate effective convergence, ensuring that the system can reach a stable operating condition despite the dynamic disturbances present in the marine environment. The utilization of the proposed sail-assisted navigation strategy can achieve an 11.6% improvement in propulsion efficiency under a sea state level of 4, substantially reducing energy consumption and promoting sustainable maritime operations.
ConclusionsThe path following performance of the proposed system exhibits not only low communication load but also strong robustness, making it highly suitable for practical deployment in maritime navigation. The research findings provide a practical and feasible technical pathway for the green transformation of marine vessels, contributing to the development of more sustainable and energy-efficient shipping technologies. Therefore, the proposed control algorithm and sail-assisted strategy could play a vital role in advancing the future of green maritime transportation.
-
0. 引 言
随着全球能源危机与环境恶化问题的加剧,发展低碳航运技术已成为船舶工业转型的必然选择[1]。转筒帆船(rotor-assisted vehicle,RAV)能够利用转筒帆产生的马格努斯效应进行高效推进,兼具结构简单、安装灵活与环境适应性强等特点,已成为近海工程与远洋运输领域的研究热点[2-4]。然而,帆−舵-桨的联合控制机理对船舶路径跟踪控制提出了巨大挑战,因此,研究融合了转筒速率调节机制的帆式船舶制导与控制一体化算法,对推动绿色船舶发展具有重要的理论价值与实际意义。
制导与控制这2大子系统是决定船舶路径跟踪性能的关键因素[5]。其中,制导系统主要负责路径解算与期望运动指令的生成,而控制系统则通过驱动执行机构实现动态误差的抑制。在制导系统设计中,视线导航法(line-of-sight,LOS)及其改进算法(如积分型ILOS[6]、自适应ALOS[7])因结构简洁目前已被广泛应用于船舶与无人机领域。Zhang等[8]提出了一种逻辑虚拟船(logical virtual ship,LVS)制导算法,通过构建虚拟船提前规划并生成光滑的参考路径,可解决传统LOS制导在转向阶段容易出现超调现象的问题。在此基础上,Li等[9]进一步提出了干预LVS制导算法,即通过引入饱和补偿函数来缓解执行器输入饱和的问题。然而,上述制导算法均需持续解算制导信号并实时传输至控制系统,导致通信信道负载过高,在复杂海况下还有可能引发数据丢包及系统失稳等潜在的风险。
在控制系统设计中,当船舶面临复杂多变的外部环境或频繁的任务切换时,传统连续控制策略往往会导致控制指令高频更新,从而引发信道带宽占用加剧、计算负担加重以及执行器磨损等一系列问题[10-12]。事件触发控制(event-triggered control,ETC)是通过预设阈值条件来实现控制指令的间歇性更新,可为解决上述问题提供有效的途径。李纪强等[13]提出一种混合阈值ETC策略,通过静态/动态阈值参数的灵活调节,在系统通信效率与跟踪精度之间实现了动态平衡。吕旻高等[14]设计了基于事件触发机制的路径参数预估器,通过对路径参数的间接更新,有效降低了多无人船协同网络的通信负载。Zhang等[15]提出了一种多端口ETC策略,该策略仅在满足触发条件时同步更新误差反馈信号和控制输入,显著降低了系统资源消耗。但值得注意的是,现有的触发机制普遍基于状态波动幅度设计阈值,当系统受持续低频扰动影响时,状态误差变化缓慢,容易因为未达到触发阈值而导致信号更新滞后,造成控制精度下降,尤其是在狭窄的水道或是港口等需要精准控制的场景中,这种滞后可能引发航迹偏移,威胁船舶航行安全。
基于以上分析,本文将以牛顿−拉格朗日非线性数学模型为控制对象,通过融合转筒帆转速调节机制,提出一种鲁棒自适应ETC算法。首先,结合现有的虚拟制导算法设计一种基于有限边界的干预LVS制导律,在兼顾输入饱和的基础上引入有限边界圆规则,有效降低制导信号的传输频率,从而避免通信冗余问题;然后,针对传统的事件触发机制在低频扰动下响应滞后的问题,提出一种耦合鲁棒神经阻尼、动态面控制和积分事件触发的自适应控制算法,用以提高船舶自主航行安全与能源利用效率。
1. 模型描述
在本文中,|⋅|表示绝对值,‖表示Euclidean范数, {\hat {( \cdot )}} 表示 ( \cdot ) 的估计值,并且 {\widetilde {( \cdot )} = \hat {( \cdot )} - ( \cdot )} 。
1.1 转筒帆船的数学模型
基于经典Fossen欠驱动船舶数学模型[16],考虑到实际的海洋环境干扰,建立适用于帆式船舶的牛顿−拉格朗日非线性数学模型如式(1)所示。
\left\{ \begin{gathered} \dot x = u\cos \left( \psi \right) - v\sin \left( \psi \right) \\ \dot y = u\sin \left( \psi \right) + v\cos \left( \psi \right) \\ \dot \psi = r \\ {m_u}\dot u = - {f_u}\left( {\boldsymbol{\nu }} \right) + {\tau _{\text{p}}} + {\tau _{\text{s}}} + {d_{{\text{w}}u}} \\ {m_v}\dot v = - {f_v}\left( {\boldsymbol{\nu }} \right) + {d_{{\text{w}}v}} \\ {m_r}\dot r = - {f_r}\left( {\boldsymbol{\nu }} \right) + {\tau _{\text{r}}} + {d_{{\text{w}}r}} \\ \end{gathered} \right. (1) 式中: {\boldsymbol{\eta}} = {\left[ {x,y,\psi } \right]^{\rm{T}}} ,为船舶位置坐标和艏向信号; {\boldsymbol{\nu }} = {\left[ {u,v,r} \right]^{\rm{T}}} ,为船舶前进速度、横漂速度和转艏角速度; {m}_{u},{m}_{v} ,{m_r}为船体附加质量; {f}_{u}\left({\boldsymbol{\nu}} \right),{f}_{v}\left({\boldsymbol{\nu}} \right) , {f_r}\left( {\boldsymbol{\nu }} \right) 为模型结构未知项; {d}_{\text{w}u},{d}_{\text{w}v} 和 {d_{{\text{w}}r}} 为外界海洋环境干扰力;{\tau _{\text{p}}} = {T_u}\left( \cdot \right)\left| n \right|n,{\tau _{\text{r}}} = {F_r}\left( \cdot \right)\delta ,分别为由螺旋桨和舵产生的前进推力与转艏力矩,其中 {T_u}\left( \cdot \right) 和{F_r}\left( \cdot \right)为执行器增益函数,n和\delta 分别为主机转速与舵角; {\tau _{\text{s}}} 为转筒帆产生的辅助推进力。
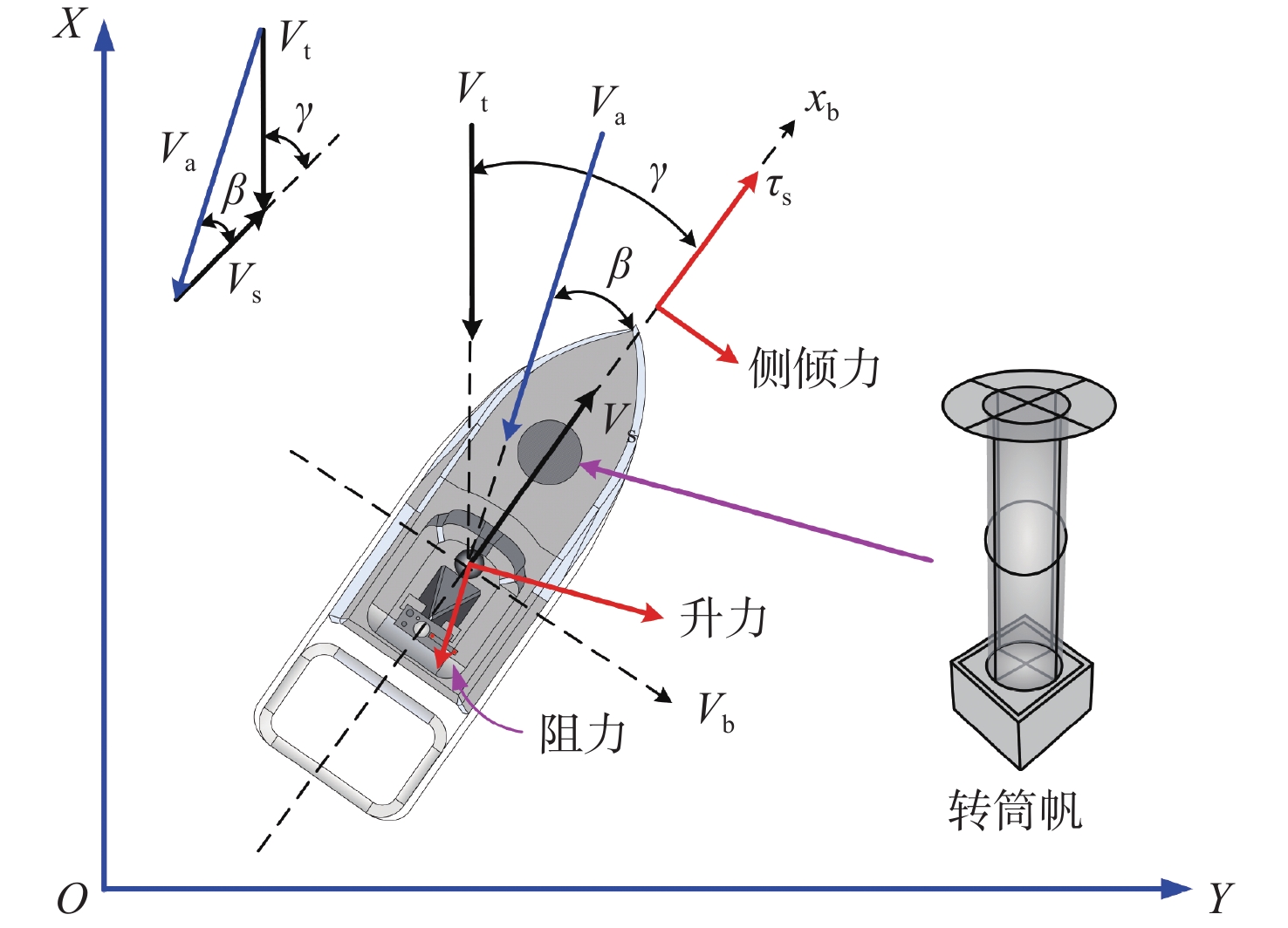
转筒帆的受力分析如图1所示。图中:X,Y轴对应大地坐标系,分别指向正北和正东;{x_{\text{b}}},{y_{\text{b}}}轴对应船舶附体坐标系,分别指向船首艏和右舷;{V_{\text{s}}}表示船速;{V_{\text{t}}},\gamma 分别为真风速度和真风向与船艏向的夹角;{V_{\text{a}}},\beta 分别为视风速度和视风向与船艏向的夹角,具体表达式如式(2)所示。
\begin{split} & {V_{\text{a}}} = \sqrt {V_{\text{s}}^2 + V_{\text{t}}^2 - 2{V_{\text{s}}}{V_{\text{t}}}\cos \gamma } \\&\;\; \beta = {\text{arc}}\cos \left( {\frac{{V_{\text{t}}^2 - V_{\text{s}}^2 - V_{\text{a}}^2}}{{ - 2{V_{\text{a}}}{V_{\text{s}}}}}} \right) \end{split} (2) 转筒帆的辅助推力可以表示为
{\tau _{\text{s}}} = 0.5{\rho _{\boldsymbol{A}}}V_{\text{a}}^2A\left( {{C_{\text{L}}}\sin \beta - {C_{\text{D}}}\cos \beta } \right) (3) 式中:{\rho _{\boldsymbol{A}}}为空气密度;A为转筒帆的最大投影面积;{C_{\text{L}}}为升力系数,{C_{\text{D}}}为阻力系数,其计算公式可参考文献[17],其核心参数旋转比(spin ratio, SR)定义为 SR = {\text{π}}d{n_{\text{s}}}/60{V_{\text{a}}} ,其中 {n_{\text{s}}} 为转筒帆转速。需注意,文献[17]所提公式仅适用于转筒直径d为上端板直径 {d_{\text{e}}} 的一半且展弦比为6的转筒帆。
在海洋工程实践中,转筒帆船通常需要根据海上实时风况动态调整转筒速率和旋转方向,从而实现最优能效。因此,本文设计了以下基于实时风场感知的转筒速率调节机制:
{n_{\text{s}}} = {\bar n_{\text{s}}}\tanh \left( {{k_{\text{s}}}\frac{{{V_{\text{a}}}\cos \beta }}{d}} \right) (4) 式中: {\bar n_{\text{s}}} 为转筒最大转速; {k_{\text{s}}} 为与转筒材料和电机效率等相关的经验系数。
为增强控制器设计的严谨性,提出以下假设:
假设1:对于外界海洋环境扰动 {d_{{\text{w}}u}} , {d_{{\text{w}}v}} 和 {d_{{\text{w}}r}} 存在未知上界 {\overline{d}}_{\text{w}u},{\overline{d}}_{\text{w}v},{\overline{d}}_{\text{w}r} ,满足 \left|{d}_{\text{w}u}\right|\le {\overline{d}}_{\text{w}u}, \left|{d}_{\text{w}v}\right|\le {\overline{d}}_{\text{w}v},\left|{d}_{\text{w}r}\right|\le {\overline{d}}_{\text{w}r} 。
假设2:船舶横漂速度被动有界稳定[18]。
假设3:期望航向 {\psi _{\text{d}}} 二阶可导。
1.2 径向基函数神经网络
引理1:结合连续分离函数技术,对于任意定义在紧集 {\Omega _{ {\boldsymbol{x}}}} \subset {\mathbb{R}^m} 上的连续函数 f\left( {\boldsymbol{x}} \right)(f(0) = 0) ,均可采用径向基函数(RBF)神经网络以任意精度逼近[19],即
f\left( {\boldsymbol{x}} \right) = {\boldsymbol{S}}\left( {\boldsymbol{x}} \right){\boldsymbol{Ax}} + \varepsilon \left( {\boldsymbol{x}} \right), \forall {\boldsymbol{x}} \in {\Omega _{\boldsymbol{x}}} (5) 式中: \varepsilon \left( {\boldsymbol{x}} \right) 为存在上界 \bar \varepsilon \left( {\boldsymbol{x}} \right) 的近似误差; {\boldsymbol{S}}\left( {\boldsymbol{x}} \right) = \left[ {{s_1}\left( {\boldsymbol{x}} \right),{s_2}\left( {\boldsymbol{x}} \right), \cdots ,{s_l}\left( {\boldsymbol{x}} \right)} \right] ,为式(6)所示的高斯函数,其中 l > 1 为神经网络节点数。
{s_i}\left( {\boldsymbol{x}} \right) = \frac{1}{{\sqrt {2\pi } {\phi _i}}}\exp \left( { - \frac{{{{\left( {{\boldsymbol{x}} - {\mu _i}} \right)}^{\rm{T}}}\left( {{\boldsymbol{x}} - {\mu _i}} \right)}}{{2\phi _i^2}}} \right) (6) 式中, {\mu _i} 和 {\phi _i} 分别为高斯函数的中心与宽度值。m为状态矢量 {\boldsymbol{x}} 的维数,则权重矩阵 {\boldsymbol{A}} 可以表示为
{\boldsymbol{A}} = \left[ {\begin{array}{*{20}{l}} {{w_{11}}}&{{w_{12}}}& \cdots &{{w_{1m}}} \\ {{w_{21}}}&{{w_{22}}}& \cdots &{{w_{2m}}} \\ {\; \vdots }&{\; \vdots }& \ddots &{\; \vdots } \\ {{w_{l1}}}&{{w_{l2}}}& \cdots &{{w_{lm}}} \end{array}} \right] (7) 2. 基于有限边界的干预制导
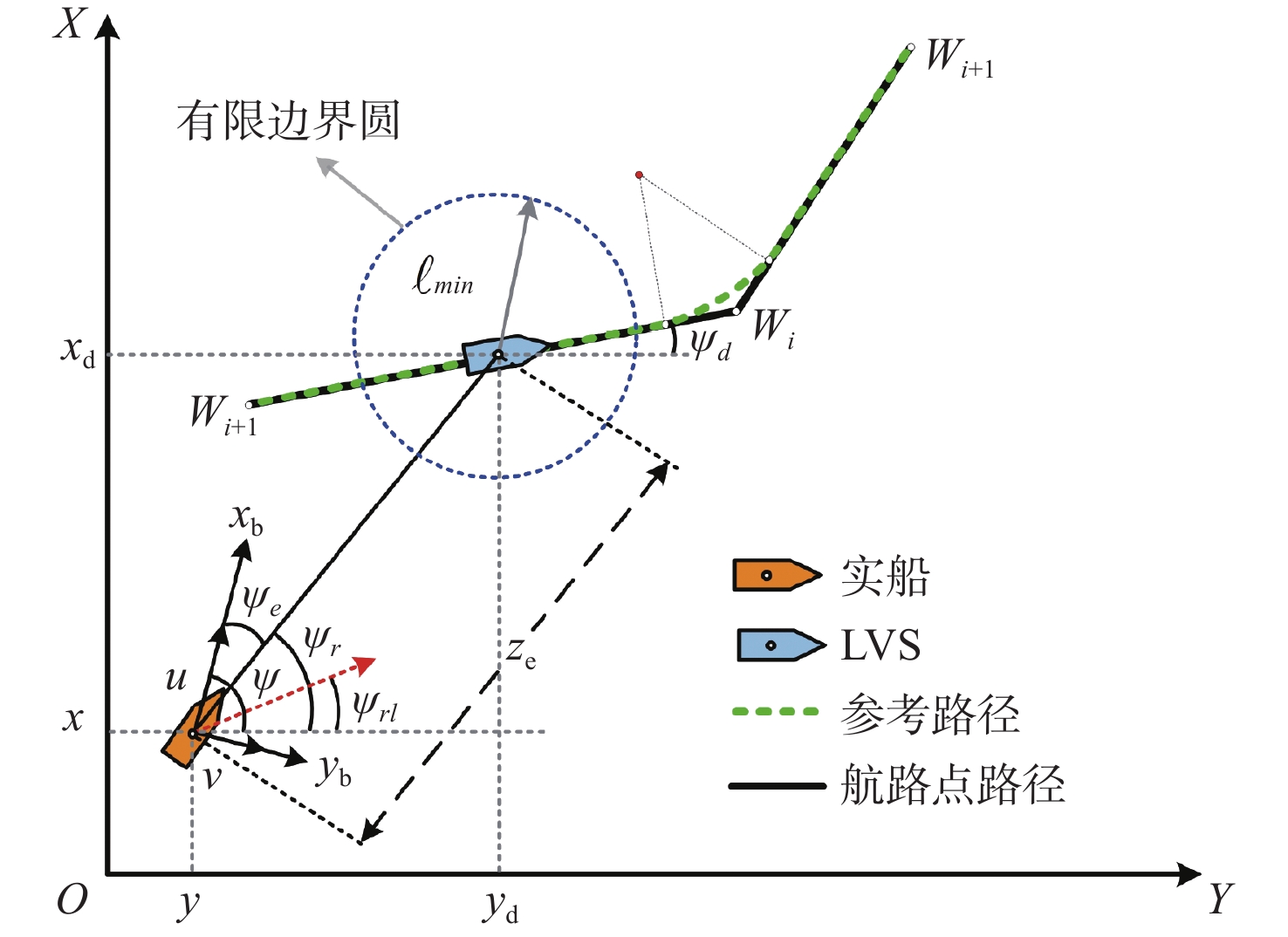
为避免转向超调问题,本文利用LVS,根据预设的航路点(Waypoint)信息{W_1}\left( {{x_1},{y_1}} \right), {W_2}\left( {{x_2},{y_2}} \right), \cdots , {W_n}\left( {{x_n},{y_n}} \right)生成平滑参考路径,如式(8)所示。设计的制导原理框架如图2所示。
\left\{ \begin{gathered} {{\dot x}_{\text{d}}} = {u_{\text{d}}}\cos \left( {{\psi _{\text{d}}}} \right) \\ {{\dot y}_{\text{d}}} = {u_{\text{d}}}\sin \left( {{\psi _{\text{d}}}} \right) \\ {{\dot \psi }_{\text{d}}} = {r_{\text{d}}} \\ \end{gathered} \right. (8) 式中: {{\boldsymbol{\eta }}_{\text{d}}} = {\left[ {{x_{\text{d}}},{y_{\text{d}}},{\psi _{\text{d}}}} \right]^{\text{T}}} ,为LVS的位置坐标和艏向信号; {u_{\text{d}}} , {r_{\text{d}}} 分别为LVS的期望前进速度和转艏角速度。根据实船与LVS的位置关系,制导律可初步推导为式(9)。
{\psi _{\text{r}}} = \frac{{\text{π}}}{2}\left[ {1 - {\text{sgn}}({x_{\text{e}}})} \right]{\text{sgn}}({y_{\text{e}}}) + \arctan \left(\frac{{{y_{\text{e}}}}}{{{x_{\text{e}}}}}\right) (9) 式中: {x}_{\text{e}}={x}_{\text{d}}-x;{y}_{\text{e}}={y}_{\text{d}}-y;{{\textit{z}}}_{\text{e}}=\sqrt{{x}_{\text{e}}^{2}+{y}_{\text{e}}^{\text{2}}} 。
进一步地,引入有限边界圆触发规则。当船舶进入边界圆覆盖区域,即满足触发条件 {{\textit{z}}_{\text{e}}} \leqslant {\ell _{\min }} 时,制导信号将停止更新,以此降低通信负载,如式(10)所示。有限边界圆的半径 {\ell _{\min }} 需根据船长、船舶操纵性能和跟踪精度需求等因素进行合理选择。
\begin{split} & \;\;\;{\psi _{\text{r}}} = {\psi _{\text{d}}},{\text{ }} t \in \left[ {{t_k},{t_{k + 1}}} \right) \\& {t_{k + 1}}{\text{ = }}\inf \left\{ {t > {t_k}\left| {{{\textit{z}}_{\text{e}}} \leqslant {\ell _{\min }}} \right.} \right\} \end{split} (10) 最后,设计式(11)所示的饱和补偿函数,将舵角约束嵌入制导律中,以缓解执行器输入饱和问题。
{\psi _{{\text{r}}\iota }} = \left\{ \begin{aligned} & {\psi _{\text{r}}},&& \left| \delta \right| < {\delta _{{\text{sat}}}} \\& {\psi _{\text{r}}} - \iota {\psi _{\text{e}}},&& \left| \delta \right| \geqslant {\delta _{{\text{sat}}}} \end{aligned}\right. (11) 式中: {\psi }_{\text{e}}={\psi }_{\text{r}\iota }-\psi ;\iota =\mathrm{tanh}\left(\delta \text{/}{\delta }_{\text{sat}}\right) ,其中\delta 为舵角,{\delta _{{\text{sat}}}}为饱和舵角。
3. 控制器设计与稳定性分析
3.1 事件触发控制器设计
步骤1:分别对位置误差{{\textit{z}}_{\text{e}}}和艏向误差{\psi _{\text{e}}}求导,得式(12)。
\begin{split} & {{\dot {\textit{z}}}_{\text{e}}} = {{\textit{z}}_{\Delta }} - u\cos \left( {{\psi _{\text{e}}}} \right) \\&\quad {{\dot \psi }_{\text{e}}} = {{\dot \psi }_{{\text{r}}\iota }} - r \end{split} (12) 式中, {{\textit{z}}_{\Delta }} = {\dot x_{\text{d}}}\cos \left( {{\psi _{{\text{r}}\iota }}} \right) + {\dot y_{\text{d}}}\sin \left( {{\psi _{{\text{r}}\iota }}} \right) - v\sin \left( {{\psi _{\text{e}}}} \right) 。
为了镇定上述跟踪误差,设计如下虚拟控制律 {\alpha _u} 和 {\alpha _r} ,其中 {k}_{{\textit{z}}},{k}_{\psi } 为正参数。
\begin{split} & {\alpha _u} = {\left( {\cos \left( {{\psi _{\text{e}}}} \right)} \right)^{ - 1}}\left( {{k_{\textit{z}}}{{\textit{z}}_{\text{e}}} + {{\textit{z}}_\Delta }} \right) \\&\qquad {\alpha _r} = {k_\psi }{\psi _{\text{e}}} + {{\dot \psi }_{{\text{r}}\iota }} \end{split} (13) 针对传统反步法在虚拟控制律设计中需进行多次微分导致的“计算复杂性爆炸”问题,引入动态面控制(dynamic surface control,DSC)技术。
\begin{split} & {\vartheta _i}{{\dot \beta }_i} + {\beta _i} = {\alpha _i} \\& {\beta _i}\left( 0 \right) = {\alpha _i}\left( 0 \right) \end{split} (14) 式中: i=u,r ; {\vartheta _i} 为大于0的时间参数;{\alpha _i}为虚拟控制律; {\beta _i} 为动态面信号。 {d_i} 为滤波误差,其表达式(15)如下,其中{B_i}( \cdot )为有界函数。
{\dot d_i} = {\dot \alpha _i} - {\dot \beta _i} = - \frac{{{d_i}}}{{{\vartheta _i}}} + {B_i}\left( \cdot \right) (15) 步骤2:定义动态误差 {u}_{\text{e}}={\beta }_{u}-u,{r}_{\text{e}}={\beta }_{r}-r 并对其求导,可得
\begin{split} & {{\dot u}_{\text{e}}} = {{\dot \beta }_u} - m_u^{ - 1}\left[ { - {f_u}\left( {\boldsymbol{\nu }} \right) + {T_u}\left( \cdot \right)\left| n \right|n + {\tau _{\text{s}}} + {d_{{\text{w}}u}}} \right]\\&\quad {{\dot r}_{\text{e}}} = {{\dot \beta }_r} - m_r^{ - 1}\left[ { - {f_r}\left( {\boldsymbol{\nu }} \right) + {F_r}\left( \cdot \right)\delta + {d_{{\text{w}}r}}} \right] \end{split} (16) 根据引理1,采用RBF神经网络在线逼近模型未知项 {f_u}\left( {\boldsymbol{\nu }} \right) 和{f_r}\left( {\boldsymbol{\nu }} \right),如式(17)所示。
{f_i}\left( {\boldsymbol{\nu }} \right) = {{\boldsymbol{S}}_i}{{\boldsymbol{A}}_i}{\boldsymbol{\nu }} + {\varepsilon _i} = {{\boldsymbol{S}}_i}{{\boldsymbol{A}}_i}{\beta _i} - {{\boldsymbol{S}}_i}{{\boldsymbol{A}}_i}{i_{\text{e}}} + {\varepsilon _i} (17) 令 {b}_{i}={\Vert {\boldsymbol{A}}_{i}\Vert }_{\text{F}},{\boldsymbol{A}}_{i}^{m}={\boldsymbol{A}}_{i}/{\Vert {\boldsymbol{A}}_{i}\Vert }_{\text{F}},{\omega }_{i}={\boldsymbol{A}}_{i}^{m}{i}_{\text{e}} ,其中 i=u,r ,进一步可以转换为 {b_i}{\omega _i} = {{\boldsymbol{A}}_i}{i_{\text{e}}} 。为简化控制器设计,构造鲁棒神经阻尼项{\eta _i},消除模型不确定性和环境干扰项。
{\eta _i} = {{\boldsymbol{S}}_i}{{\boldsymbol{A}}_i}{\beta _i} + {\varepsilon _i} - {d_{{\text{w}}i}} \leqslant {{\boldsymbol{S}}_i}{{\boldsymbol{A}}_i}{\beta _i} + {{\bar \varepsilon }_i} + {{\bar d}_{{\text{w}}i}} \leqslant {\theta _i}{\varphi _i} (18) 式中: {\varphi }_{i}=1+\Vert {S}_{i}\Vert ;{\theta }_{i}=\mathrm{max}\{\Vert {\boldsymbol{A}}_{i}{\beta }_{i}\Vert ,{\overline{\varepsilon }}_{i}+{\overline{d}}_{\text{w}i}\} 。
对于复杂海况下的转筒帆船,持续调整转筒速率不可避免地会导致船舶主机和舵机控制输入 n,\delta 的频繁变化。因此,本文设计了一种基于累计误差的积分事件触发机制,其核心设计如下。
\left\{ \begin{gathered} n\left( {{t_u}} \right) = n_k^u\left( {t_k^u} \right), \forall {t_u} \in \left[ {t_k^u, t_{k + 1}^u} \right] \\ \delta \left( {{t_r}} \right) = \delta _k^r\left( {t_k^r} \right), \forall {t_r} \in \left[ {t_k^r, t_{k + 1}^r} \right] \\ \end{gathered} \right. (19) 当且仅当满足式(20)的事件触发条件时,控制命令才会更新,否则,保持不变。
\left\{ \begin{gathered} t_{k + 1}^u = \inf \left\{ {{t_u} > t_k^u\left| { \int_{t_k^u}^{{t_u}} {\left| {{e_u}} \right|} \geqslant {\varpi _u}\left| n \right| + {\varsigma _u}} \right.} \right\} \\ t_{k + 1}^r = \inf \left\{ {{t_r} > t_k^r\left| { \int_{t_k^u}^{{t_u}} {\left| {{e_r}} \right|} \geqslant {\varpi _r}\left| \delta \right| + {\varsigma _r}} \right.} \right\} \\ \end{gathered} \right. (20) 式中: {e}_{u}={n}_{u}\left({t}_{u}\right)-{n}_{k}^{u}\left({t}_{k}^{u}\right);{e}_{r}=\delta \left({t}_{r}\right)-{\delta }_{k}^{r}\left({t}_{k}^{r}\right) ; {\varpi _i},{\varsigma _i},i = u,r ,为正的触发阈值参数。
通过结合自适应技术,对系统增益不确定性进行在线补偿,令{\lambda _u} = {1 \mathord{\left/ {\vphantom {1 {{T_u}\left( \cdot \right)}}} \right. } {{T_u}\left( \cdot \right)}},{\lambda _r} = {1 \mathord{\left/ {\vphantom {1 {{F_r}\left( \cdot \right)}}} \right. } {{F_r}\left( \cdot \right)}},则 N\text{=}\left|{n}_{k}^{u}\right|{n}_{k}^{u}={\hat{\lambda }}_{u}{\alpha }_{N},{\delta }_{k}^{r}={\hat{\lambda }}_{r}{\alpha }_{\delta } 。其中, {\alpha _N} 和{\alpha _\delta }为直接控制律,如式(21)所示,相应的自适应律如式(22)所示。
\begin{split} & {\alpha _N} = {k_u}{u_{\text{e}}} + {{\dot \beta }_u} + {k_{u{\text{e}}}}{\varPhi _u}{u_{\text{e}}} - {\tau _{\text{s}}} \\&\quad {\alpha _\delta } = {k_r}{r_{\text{e}}} + {{\dot \beta }_r} + {k_{r{\text{e}}}}{\varPhi _r}{r_{\text{e}}} \end{split} (21) \begin{split} & {{\dot {\hat \lambda} }_u} = {\chi _u}\left[ {{\alpha _N}{u_{\text{e}}} - {\gamma _u}\left( {{{\hat \lambda }_u} - {{\hat \lambda }_u}\left( 0 \right)} \right)} \right] \\& {{\dot {\hat \lambda} }_r} = {\chi _r}\left[ {{\alpha _\delta }{r_{\text{e}}} - {\gamma _r}\left( {{{\hat \lambda }_r} - {{\hat \lambda }_r}\left( 0 \right)} \right)} \right] \end{split} (22) 式中: {\varPhi _i} = {{\left( {\varphi _i^2 + {\boldsymbol{S}}{{\left( {\boldsymbol{\nu }} \right)}^{\text{T}}}{\boldsymbol{S}}\left( {\boldsymbol{\nu }} \right)} \right)}/ 4} ,其中 i=u,r ; {k_u},{k_r}, {k_{u{\text{e}}}},{k_{r{\text{e}}}},{\chi _u},{\chi _r},{\gamma _u},{\gamma _r} 为人为设定的正参数;定义自适应误差为 {\tilde{\lambda }}_{u}={\hat{\lambda }}_{u}-{\lambda }_{u},{\tilde{\lambda }}_{r}={\hat{\lambda }}_{r}-{\lambda }_{r} 。
3.2 系统稳定性分析
定理1:基于转筒帆船模型(式(1)~式(4)),在满足假设1~假设3的条件下,采用虚拟控制律(式(13))、动态面技术(式(14))、积分事件触发规则(式(19)~式(20))、控制律(式(21))和自适应律(式(22)),可以保证闭环控制系统中的所有误差变量满足半全局一致最终有界(semi-global uniform and ultimately bounded,SGUUB),并且通过合理调节设计参数,可以使跟踪误差收敛至零点附近的任意小邻域内。
证明:构造Lyapunov候选函数V。
\begin{split} & V = \frac{1}{2}{\textit{z}}_{\text{e}}^2 + \frac{1}{2}\psi _{\text{e}}^2 + \frac{1}{2}d_u^2 + \frac{1}{2}d_r^2 + \frac{1}{2}{m_u}u_{\text{e}}^2 + \\ &\quad\quad \frac{1}{2}{m_r}r_{\text{e}}^2 + \frac{{{T_u}\left( \cdot \right)}}{{2{\chi _u}}}\tilde \lambda _u^2 + \frac{{{F_r}\left( \cdot \right)}}{{2{\chi _r}}}\tilde \lambda _r^2 \end{split} (23) 对V进行求导,可得
\begin{split} & \dot V = {{\textit{z}}_{\text{e}}}\left( {{{\textit{z}}_{\Delta }} - u\cos \left( {{\psi _{\text{e}}}} \right)} \right) + {\psi _{\text{e}}}\left( {{{\dot \psi }_{{\text{r}}\iota }} - r} \right) + \\& \quad\;\; {d_u}{{\dot d}_u} + {d_r}{{\dot d}_r} + {m_u}{u_{\text{e}}}{{\dot \beta }_u} + {m_r}{r_{\text{e}}}{{\dot \beta }_r} + \\& \quad {u_{\text{e}}}\left[ { - {T_u}\left( \cdot \right){{\hat \lambda }_u}{\alpha _N} - {\tau _{\text{s}}} - {b_u}{{\boldsymbol{S}}_u}{\omega _u}} \right] + \\& \quad {r_{\text{e}}}\left[ { - {F_r}\left( \cdot \right){{\hat \lambda }_r}{\alpha _\delta } - {b_r}{{\boldsymbol{S}}_r}{\omega _r}} \right] + {\eta _u}{u_{\text{e}}} + \\& \;\;\; {\eta _r}{r_{\text{e}}} + {T_u}\left( \cdot \right)\chi _u^{ - 1}{{\tilde \lambda }_u}{{\dot \hat \lambda }_u} + {F_r}\left( \cdot \right)\chi _r^{ - 1}{{\tilde \lambda }_r}{{\dot \hat \lambda }_r} \end{split} (24) 为了对式(24)进行放缩处理,引入杨氏不等式(式(25)~式(27)),其中{c_i}为正参数。
\begin{split} & {d_i}{{\dot d}_i} = - \frac{{d_i^2}}{{{\vartheta _i}}} + {d_i}{B_i} \leqslant - \frac{{d_i^2}}{{{\vartheta _j}}} + \frac{{B_i^2d_i^2\bar B_i^2}}{{2{c_i}\bar B_i^2}} + \frac{{{c_i}}}{2} \leqslant \\&\qquad\qquad - \left( {\frac{1}{{{\vartheta _i}}} - \frac{{\bar B_i^2}}{{2{c_i}}}} \right)d_i^2 + \frac{{{c_i}}}{2} \end{split} (25) \begin{split} & {\eta _i}{i_{\text{e}}} - {b_i}{{\boldsymbol{S}}_i}{\omega _i}{i_{\text{e}}} \leqslant \frac{{{k_{i{\text{e}}}}\varphi _i^2i_{\text{e}}^2}}{4} + \frac{{\theta _i^2}}{{{k_{i{\text{e}}}}}} + \frac{{{k_{i{\text{e}}}}{\boldsymbol{S}}_i^2i_{\text{e}}^2}}{4} + \frac{{b_i^2\omega _i^{\text{T}}{\omega _i}}}{{{k_{i{\text{e}}}}}} \leqslant\\& \qquad\qquad {k_{i{\text{e}}}}{\varPhi _i}i_{\text{e}}^{\text{2}} + \frac{{\theta _i^2}}{{{k_{i{\text{e}}}}}} + \frac{{b_i^2\omega _i^{\text{T}}{\omega _i}}}{{{k_{i{\text{e}}}}}} \end{split} (26) \left( {{m_i} - 1} \right){{\dot \beta }_i}{i_{\text{e}}} \leqslant \left( {{m_i} + 1} \right)\left| {\frac{{{d_i}}}{{{\vartheta _i}}}} \right|{i_{\text{e}}} \leqslant \frac{{\left( {{m_i} + 1} \right)i_{\text{e}}^2}}{{{\vartheta _i}}} + \frac{{\left( {{m_i} + 1} \right)d_i^2}}{{4{\vartheta _i}}} (27) 结合控制律(式(21))和自适应律(式(22)), \dot V 最终可简化为式(28)。
\begin{split} & \dot V \leqslant - \left( {{k_{\textit{z}}} - 1} \right){\textit{z}}_{\text{e}}^2 - \left( {{k_\psi } - 1} \right)\psi _{\text{e}}^2 - {\kappa _{du}}d_u^2 - {\kappa _{dr}}d_r^2 - \\ &\quad\quad {\kappa _u}u_{\text{e}}^2 - {\kappa _r}r_{\text{e}}^2 + \frac{{{c_u}}}{2} + \frac{{{c_r}}}{2} - \frac{{{\gamma _u}}}{2}{T_u}\left( \cdot \right)\tilde \lambda _u^2 - \\ &\quad\quad \frac{{{\gamma _r}}}{2}{F_r}\left( \cdot \right)\tilde \lambda _r^2 + \frac{{{\gamma _u}}}{2}{T_u}\left( \cdot \right){\left( {{\lambda _u} - {{\hat \lambda }_u}\left( 0 \right)} \right)^2} + \\ &\quad\quad\;\;\; \frac{{{\gamma _r}}}{2}{F_r}\left( \cdot \right){\left( {{\lambda _r} - {{\hat \lambda }_r}\left( 0 \right)} \right)^2} + \frac{{\theta _u^2}}{{{k_{u{\text{e}}}}}} + \frac{{\theta _r^2}}{{{k_{r{\text{e}}}}}} \end{split} (28) 其中:
\begin{split} & {\kappa _{di}} = \frac{1}{{{\vartheta _i}}} - \frac{{\bar B_i^2}}{{2{c_i}}} - \frac{1}{2} - \frac{{{m_i} + 1}}{{4{\vartheta _i}}} \\& {\kappa _i} = {k_i} - \frac{1}{2} - \frac{{{m_i} + 1}}{{{\vartheta _i}}} - \frac{{b_i^2}}{{{k_{i{\text{e}}}}}} \end{split} (29) 定义 \kappa = \min \left\{ {{k_{\textit{z}}} - 1,{k_\psi } - 1,{\kappa _{di}},{\kappa _i},{\gamma _i}\chi _i^{ - 1}} \right\},2D ={T_u}\left( \cdot \right) {\gamma _u}{\left( {{\lambda _u} - {{\hat \lambda }_u}\left( 0 \right)} \right)^2} + {F_r}\left( \cdot \right){\gamma _r}{\left( {{\lambda _r} - {{\hat \lambda }_r}\left( 0 \right)} \right)^2} + {c_u} + {c_r} + \theta _u^2/{k_{u{\text{e}}}} + \theta _r^2/{k_{r{\text{e}}}} ,则式(28)可进一步表示为
\dot V \leqslant 2\kappa V + D (30) 分别对两端进行积分运算,可得
V\left( t \right) \leqslant \frac{D}{{2\kappa }} + \left( {V\left( 0 \right) - \frac{D}{{2\kappa }}} \right)\exp \left( { - 2\kappa t} \right) (31) 式中: V(t) 有界且满足 \mathop {\lim }\limits_{t \to \infty } V(t) \leqslant D/2\kappa 。因此,本文所设计控制器中所有的误差信号均满足SGUUB收敛,定理1得证。
4. 仿真实验
为了验证所提控制算法的有效性和优越性,本文选取文献[20]中提出的算法作为对比算法,基于NORSOK风谱和JONSWAP波谱对4级海况下的海洋环境予以了模拟[10],风速10 m/s,风向180°。在相同初始条件下,采用三自由度的转筒帆船(船长38 m,船宽6.8 m,质量118 000 kg,转筒高度18 m,转筒直径3 m)作为被控对象,进行MATLAB数值仿真实验。在本节仿真实验中,船舶的路径跟踪控制建立在转筒风帆转速调节机制之上,即优先考虑风帆助航的节能效率。实验仿真步长设置为0.01 s,船舶初始航向为0°,主要设计参数如表1所示。
表 1 主要设计参数Table 1. Main design parameters参数 数值 参数 数值 {k_{\textit{z}}} 1.2 {\chi _r} 0.1 {k_\psi } 10 {\gamma _u} 0.8 {k_u} 3.5 {\gamma _r} 1.2 {k_r} 1.3 {\vartheta _i} 0.1 {k_{u{\text{e}}}} 3.0 {\varpi _u} 3.0 {k_{r{\text{e}}}} 3.0 {\varpi _r} 2 5 {\chi _u} 0.05 {\varsigma _i} 5.0 在系统仿真过程中,参数的选取主要依赖于经验指导与试错机制相结合的方法。众所周知,较大的增益系数 {k_{\textit{z}}},{k_\psi },{k_u},{k_r} 能够有效提高系统跟踪精度。然而,这种配置可能会引发控制信号幅值超限和系统抖动,导致控制资源的过度消耗。同时,较大的事件触发阈值参数 {\varpi _u},{\varpi _r},{\varsigma _u},{\varsigma _r} 虽然能显著降低信号传输频率,却也可能造成控制精度的损失。因此,需要通过多次仿真实验进行有针对性的参数优化,进而在跟踪精度、能源效率和控制平滑度之间实现最佳平衡。
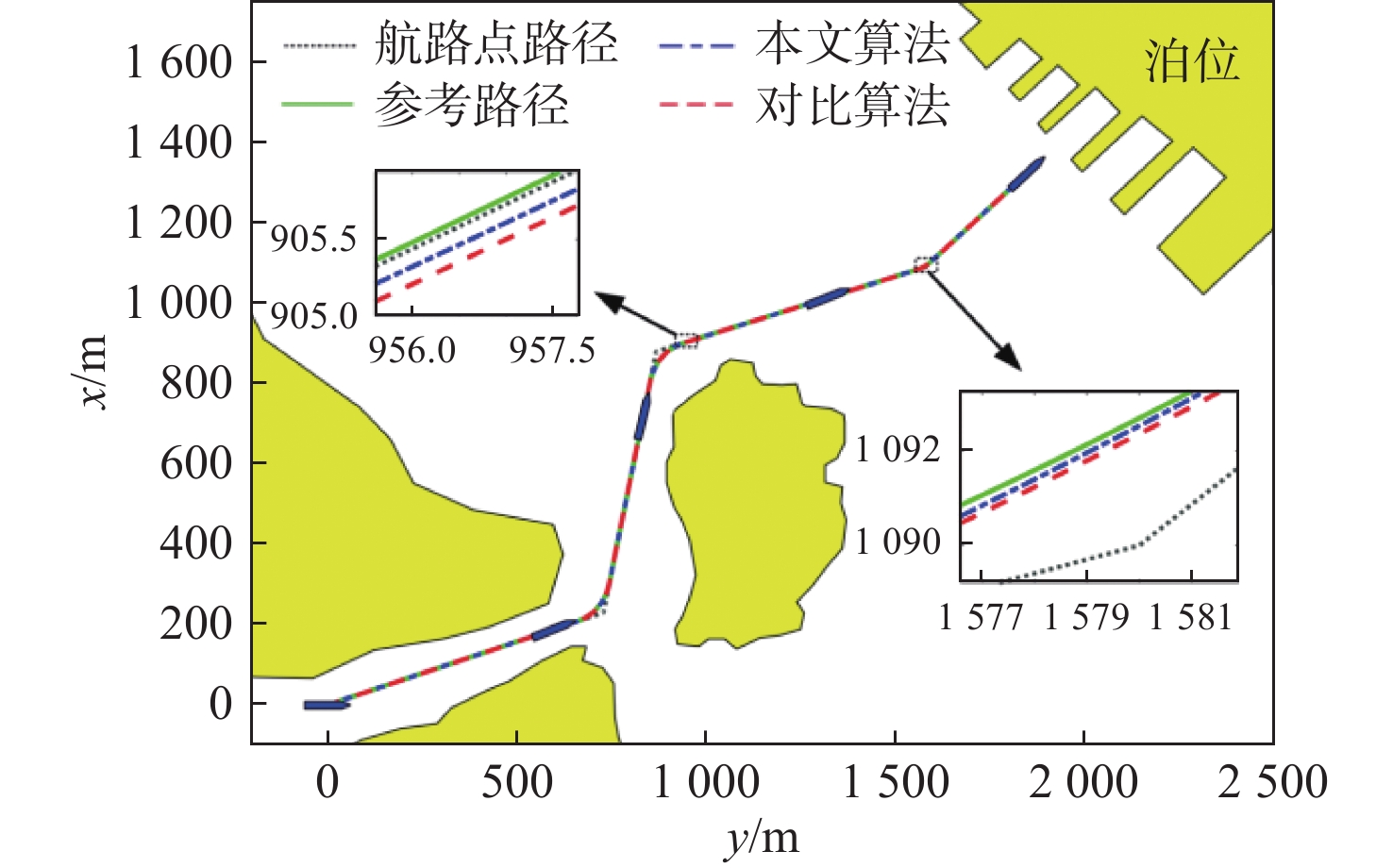
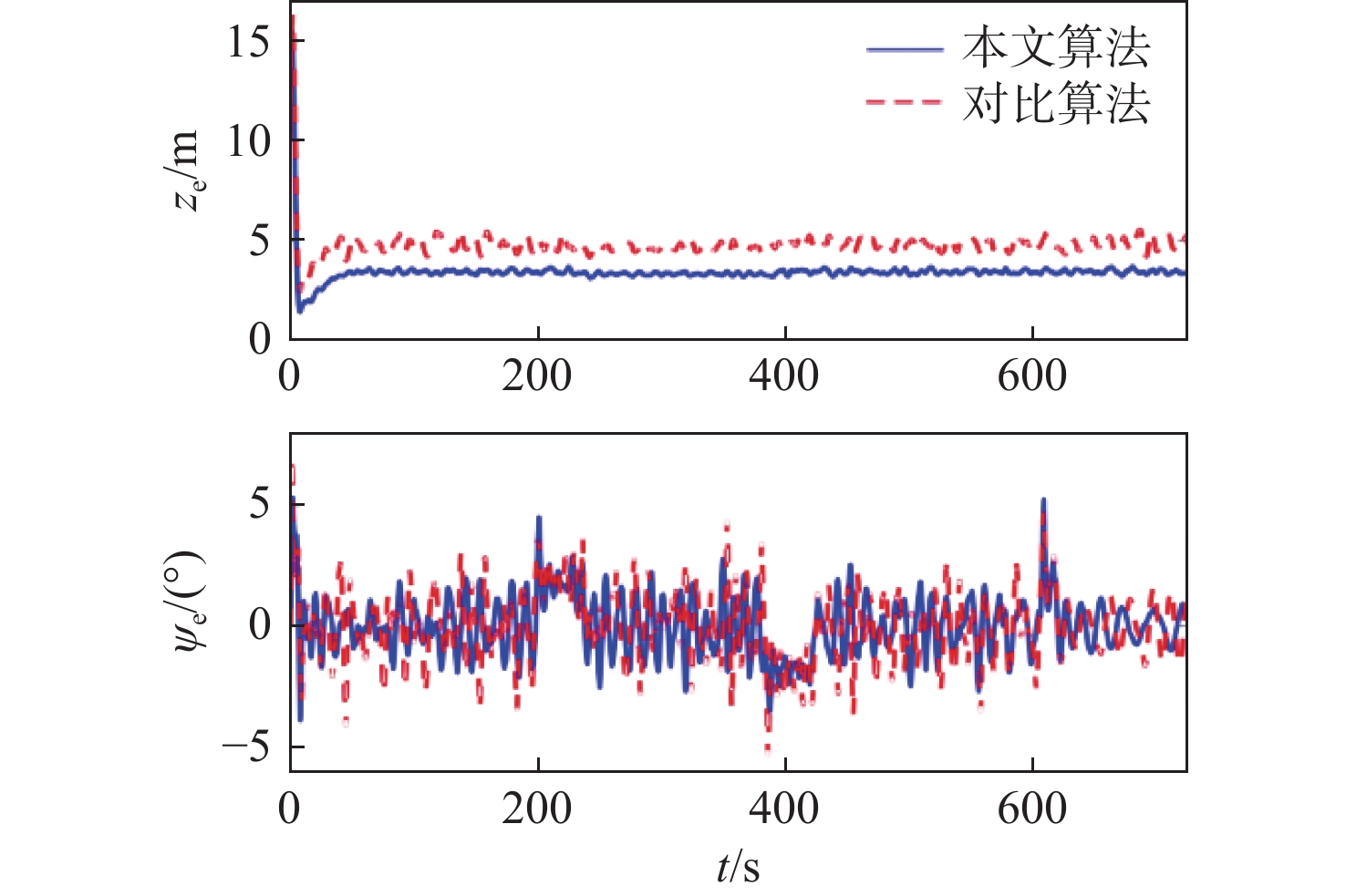
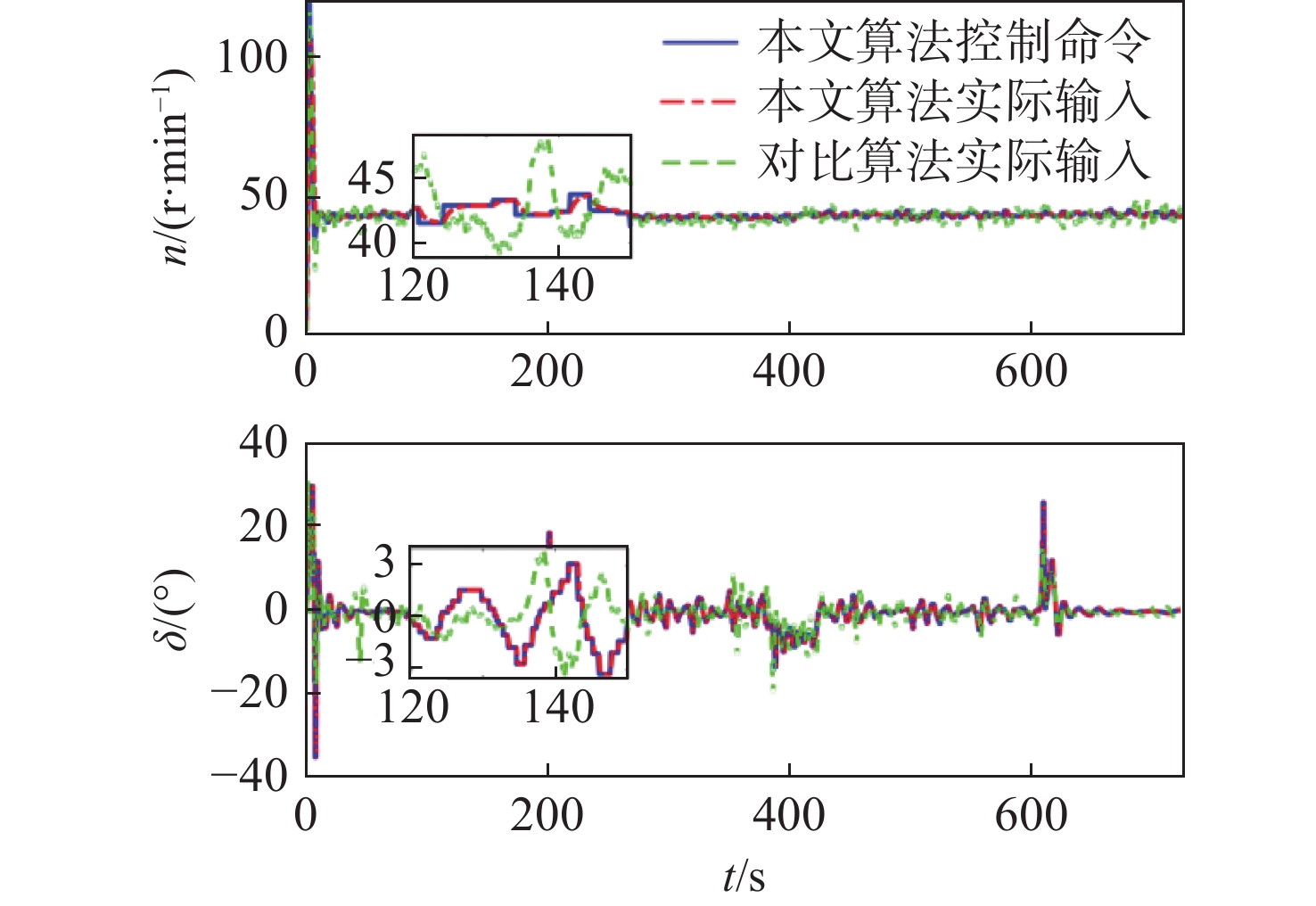
实验仿真结果如图3~图8所示。图3展示了转筒帆船在2种控制算法下的路径跟踪轨迹和局部轨迹放大图。图4为2种算法下船舶的跟踪误差曲线。由图可知,本文算法具备更高的控制精度以及更快的响应能力,能够将位置和艏向误差精准控制在 \pm 3 m和 \pm 5°范围内。图5描述了2种算法下的控制输入曲线。值得注意的是,由于事件触发机制和伺服系统的引入,本文算法的控制输入均处于执行器动作允许范围内,且信号抖振明显下降,有效减少了执行器的机械磨损,能为船舶长期稳定运行提供有力的保障。
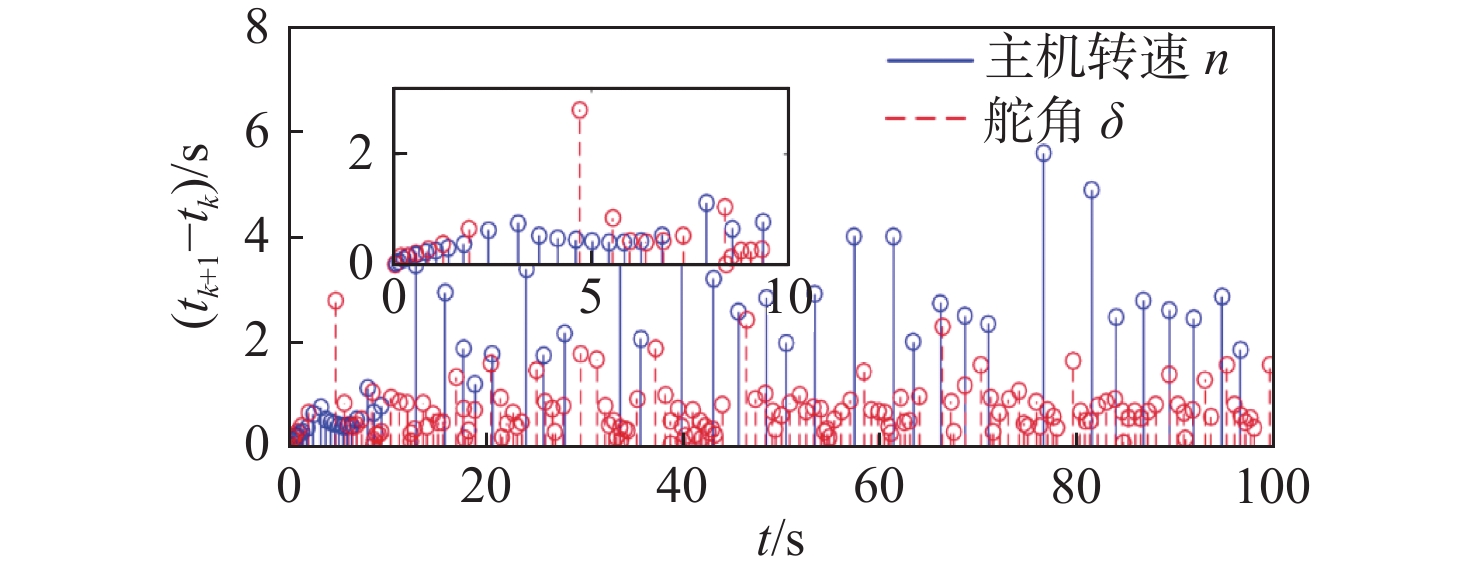
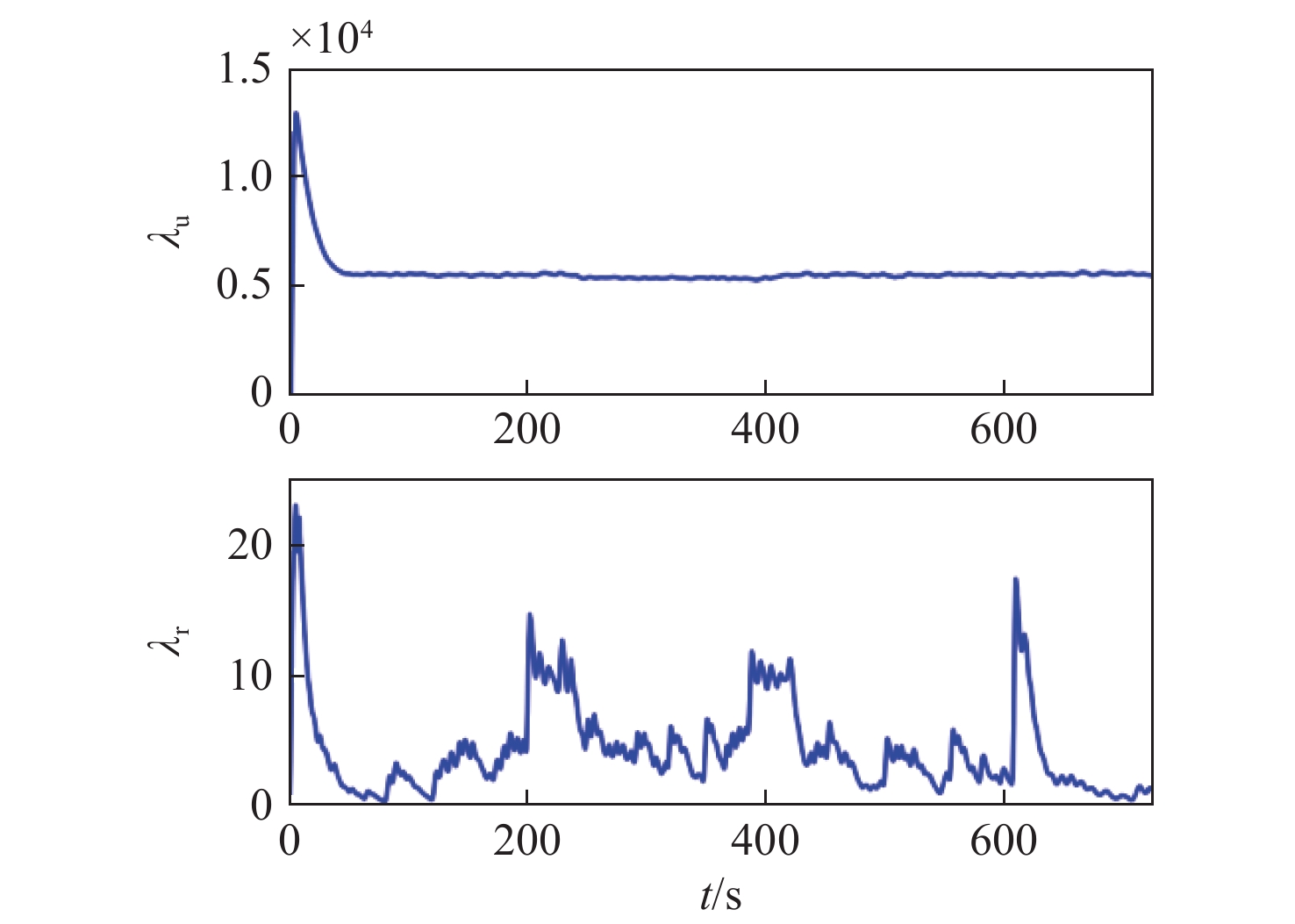
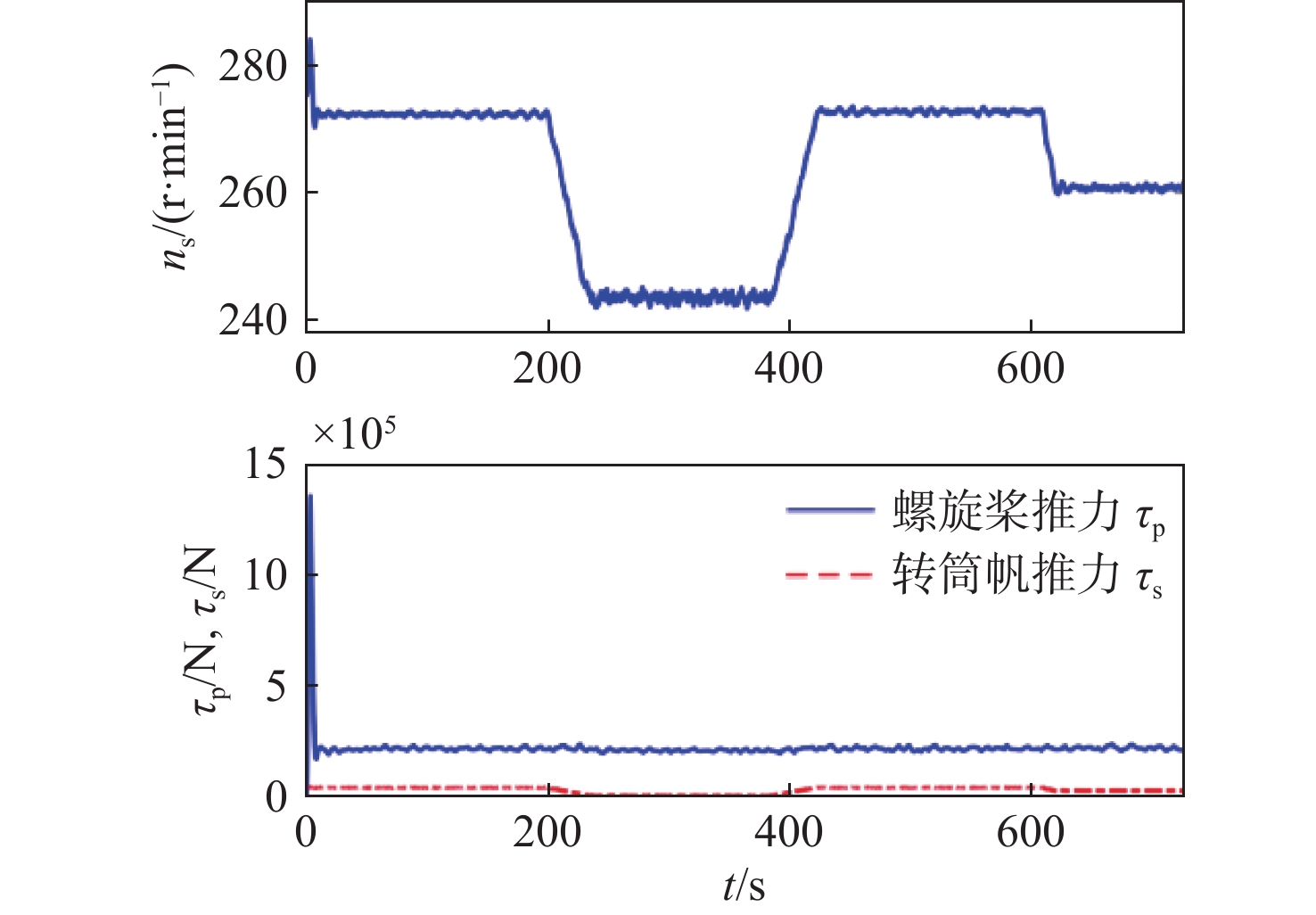
图6所示为本文算法在0~100 s时的事件触发采样间隔示意图。图7所示为控制器自适应参数曲线,由图可见所设计的自适应律能够有效收敛。图8呈现了本文算法下转筒帆的转速及其螺旋桨推力{\tau _{\text{p}}}与转筒帆推力{\tau _{\text{s}}}之间的对比曲线。航程能耗节省(energy consumption saving,ECS)可通过 {\text{ECS}} = {\tau _{\text{s}}}/({\tau _{\text{p}}} + {\tau _{\text{s}}}) 计算。结果显示,采用转筒风帆助航策略能够节省约11.6%的能源消耗,这对推动航运业朝绿色、可持续方向转型具有重要意义。
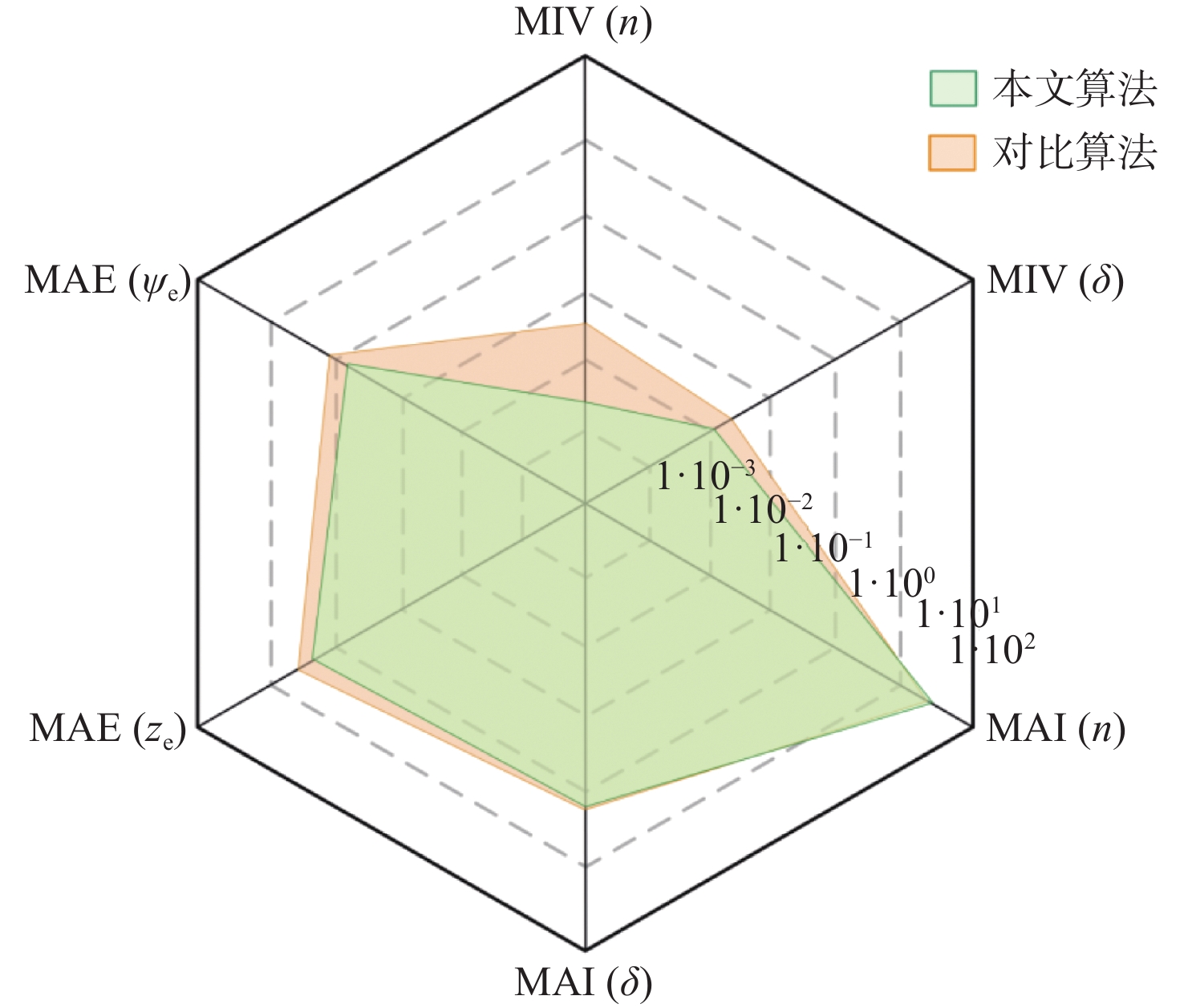
为定量分析本文算法控制性能的优势,选取了3个具有代表性的指标[5],即平均绝对控制误差(MAE)、平均绝对控制输入(MAI)和平均控制输入变差(MIV),这3个指标分别用于精度评估、能耗评估和执行器寿命评估。图9展示了2种控制算法量化指标的对比雷达图。由图可见,除了MAI的数值相近外,本文算法的MAE和MIV指标均明显低于对比算法,这就意味着本文算法具有更高的控制精度和更长的执行器寿命,与前文的分析结果一致。
5. 结 语
本文针对考虑转筒速率调节的转筒帆船路径跟踪控制问题,提出了一种结合改进干预LVS制导律与积分事件触发机制的鲁棒自适应控制算法,该算法通过引入有限边界圆规则,显著降低了制导系统的通信负载,并通过饱和补偿函数抑制了舵机输入饱和现象,提升了系统稳定性。此外,所设计的积分事件触发控制算法在维持跟踪精度(位置误差≤3 m,艏向偏差≤5°)的前提下,能显著降低控制命令的传输频率,有效缓解了执行器的机械磨损与工作强度。仿真实验表明,在4级海况下,所提风帆助航策略可实现11.6%的推进系统能效提升,对推动低碳航运技术发展具有重要的工程应用价值。
未来,可通过集成机器学习与强化学习等智能算法,实现海洋环境参数的在线辨识与动态趋势预测,从而提前调整船舶控制策略与转筒帆转速参数,进一步提升船舶在复杂海况下的航行性能与节能效果。
-
表 1 主要设计参数
Table 1 Main design parameters
参数 数值 参数 数值 {k_{\textit{z}}} 1.2 {\chi _r} 0.1 {k_\psi } 10 {\gamma _u} 0.8 {k_u} 3.5 {\gamma _r} 1.2 {k_r} 1.3 {\vartheta _i} 0.1 {k_{u{\text{e}}}} 3.0 {\varpi _u} 3.0 {k_{r{\text{e}}}} 3.0 {\varpi _r} 2 5 {\chi _u} 0.05 {\varsigma _i} 5.0  下载: 导出CSV
下载: 导出CSV
-
[1] 范爱龙, 严新平, 李忠奎, 等. 我国航运业绿色低碳发展的需求、路径与展望[J]. 船海工程, 2024, 53(4): 1–5,12. doi: 10.3963/j.issn.1671-7953.2024.04.001 FAN A L, YAN X P, LI Z K, et al. Demand, pathway, and prospects of green and low-carbon development in China’s shipping industry[J]. Ship & Ocean Engineering, 2024, 53(4): 1–5,12 (in Chinese). doi: 10.3963/j.issn.1671-7953.2024.04.001
[2] ZHANG G Q, LI J Q, CHANG T Y, et al. Autonomous navigation and control for a sustainable vessel: a wind-assisted strategy[J]. Sustainable Horizons, 2025, 13: 100117. doi: 10.1016/j.horiz.2024.100117
[3] 李振琦, 袁文鑫, 李广年, 等. Magnus旋转式船舶节能装置特性分析[J]. 中国舰船研究, 2020, 15(S1): 87–91,140. doi: 10.19693/j.issn.1673-3185.02040 LI Z Q, YUAN W X, LI G N, et al. Characteristic analysis of Magnus rotating marine energy saving device[J]. Chinese Journal of Ship Research, 2020, 15(S1): 87–91,140 (in Chinese). doi: 10.19693/j.issn.1673-3185.02040
[4] TILLIG F, RINGSBERG J W. Design, operation and analysis of wind-assisted cargo ships[J]. Ocean Engineering, 2020, 211: 107603. doi: 10.1016/j.oceaneng.2020.107603
[5] 李志豪, 张国庆, 李纪强, 等. 基于AIS轨迹重现任务的船舶路径跟踪迭代控制[J/OL]. 中国舰船研究. https://www.ship-research.com/cn/article/doi/10.19693/j.issn.1673-3185.03924. LI Z H, ZHANG G Q, LI J Q, et al. Iterative path following control of underactuated ships based on AIS trajectory reproduction tasks[J/OL]. Chinese Journal of Ship Research. https://www.ship-research.com/cn/article/doi/10.19693/j.issn.1673-3185.03924 (in Chinese). (查阅网上资料,未找到本条文献更新和引用日期信息,请确认)
[6] CAHARIJA W, PETTERSEN K Y, BIBULI M, et al. Integral line-of-sight guidance and control of underactuated marine vehicles: theory, simulations, and experiments[J]. IEEE Transactions on Control Systems Technology, 2016, 24(5): 1623–1642. doi: 10.1109/TCST.2015.2504838
[7] LIU Z L, SONG S M, YUAN S Z, et al. ALOS-based USV path-following control with obstacle avoidance strategy[J]. Journal of Marine Science and Engineering, 2022, 10(9): 1203. doi: 10.3390/jmse10091203
[8] ZHANG G Q, ZHANG X K. Concise robust adaptive path-following control of underactuated ships using DSC and MLP[J]. IEEE Journal of Oceanic Engineering, 2014, 39(4): 685–694. doi: 10.1109/JOE.2013.2280822
[9] LI J Q, ZHANG G Q, ZHANG X K, et al. Practical multiport event-triggered control for ASV via the intervened LVS guidance[J]. Ocean Engineering, 2022, 263: 112401. doi: 10.1016/j.oceaneng.2022.112401
[10] 刘训文, 徐超, 陈再发. 事件触发的自适应PID海洋水面船舶航迹跟踪控制[J]. 上海海事大学学报, 2023, 44(2): 11–17. doi: 10.13340/j.jsmu.2023.02.003 LIU X W, XU C, CHEN Z F. Event-triggered adaptive PID trajectory tracking control for marine surface vehicles[J]. Journal of Shanghai Maritime University, 2023, 44(2): 11–17 (in Chinese). doi: 10.13340/j.jsmu.2023.02.003
[11] 李纪强, 张国庆, 黄晨峰, 等. 考虑执行器故障的无人帆船事件触发控制[J]. 系统工程与电子技术, 2022, 44(1): 242–249. doi: 10.12305/j.issn.1001-506X.2022.01.30 LI J Q, ZHANG G Q, HUANG C F, et al. Event-triggered control for unmanned sailboat with actuator failures[J]. Systems Engineering and Electronics, 2022, 44(1): 242–249 (in Chinese). doi: 10.12305/j.issn.1001-506X.2022.01.30
[12] HU X, GONG Q T, HAN J, et al. Dynamic event-triggered composite anti-disturbance fault-tolerant tracking control for ships with disturbances and actuator faults[J]. Ocean Engineering, 2023, 280: 114662. doi: 10.1016/j.oceaneng.2023.114662
[13] 李纪强, 张国庆, 张显库, 等. 基于混合阈值事件触发机制的船舶自适应神经滑模控制[J]. 控制理论与应用, 2023, 40(9): 1665–1671. doi: 10.7641/CTA.2022.20215 LI J Q, ZHANG G Q, ZHANG X K, et al. Adaptive neural sliding mode control for USV with the hybrid threshold event-triggered mechanism[J]. Control Theory & Applications, 2023, 40(9): 1665–1671 (in Chinese). doi: 10.7641/CTA.2022.20215
[14] 吕旻高, 古楠, 刘陆, 等. 基于动态事件触发的多无人船协同路径跟踪控制[J]. 中国舰船研究, 2025, 20(1): 213–222. doi: 10.19693/j.issn.1673-3185.03774 LÜ M G, GU N, LIU L, et al. Dynamic event trigger based cooperative path following control for multiple unmanned surface vehicles[J]. Chinese Journal of Ship Research, 2025, 20(1): 213–222 (in Chinese). doi: 10.19693/j.issn.1673-3185.03774
[15] ZHANG G Q, LI J Q, JIN X, et al. Robust adaptive neural control for wing-sail-assisted vehicle via the multiport event-triggered approach[J]. IEEE Transactions on Cybernetics, 2022, 52(12): 12916–12928. doi: 10.1109/TCYB.2021.3091580
[16] FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. Chichester: John Wiley & Sons, 2011.
[17] AMMAR N R, SEDDIEK I S. Wind assisted propulsion system onboard ships: case study Flettner rotors[J]. Ships and Offshore Structures, 2022, 17(7): 1616–1627. doi: 10.1080/17445302.2021.1937797
[18] MU D D, LI J S, WANG G F, et al. Disturbance rejection control of adaptive integral LOS unmanned ship path following based on fast wave inversion[J]. Applied Ocean Research, 2024, 144: 103907. doi: 10.1016/j.apor.2024.103907
[19] LIANG H J, LIU G L, ZHANG H G, et al. Neural-network-based event-triggered adaptive control of nonaffine nonlinear multiagent systems with dynamic uncertainties[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(5): 2239–2250. doi: 10.1109/TNNLS.2020.3003950
[20] 唐思星, 邓英杰, 赵运利. 自主水下航行器事件触发自适应神经渐近深度跟踪控制[J]. 大连海事大学学报, 2023, 49(4): 57–64. doi: 10.16411/j.cnki.issn1006-7736.2023.04.007 TANG S X, DENG Y J, ZHAO Y L. Event-triggered adaptive neural asymptotic depth tracking control of autonomous underwater vehicles[J]. Journal of Dalian Maritime University, 2023, 49(4): 57–64 (in Chinese). doi: 10.16411/j.cnki.issn1006-7736.2023.04.007
计量
- 文章访问数: 90
- HTML全文浏览量: 33
- PDF下载量: 1
